#include <vector>#include <sstream>#include <optional>#include <geometry_msgs/msg/pose.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_state/robot_state.h>#include <moveit/robot_state/conversions.h>#include <moveit/kinematic_constraints/utils.h>#include "robotconfiguration.h"#include "jointconfiguration.h"
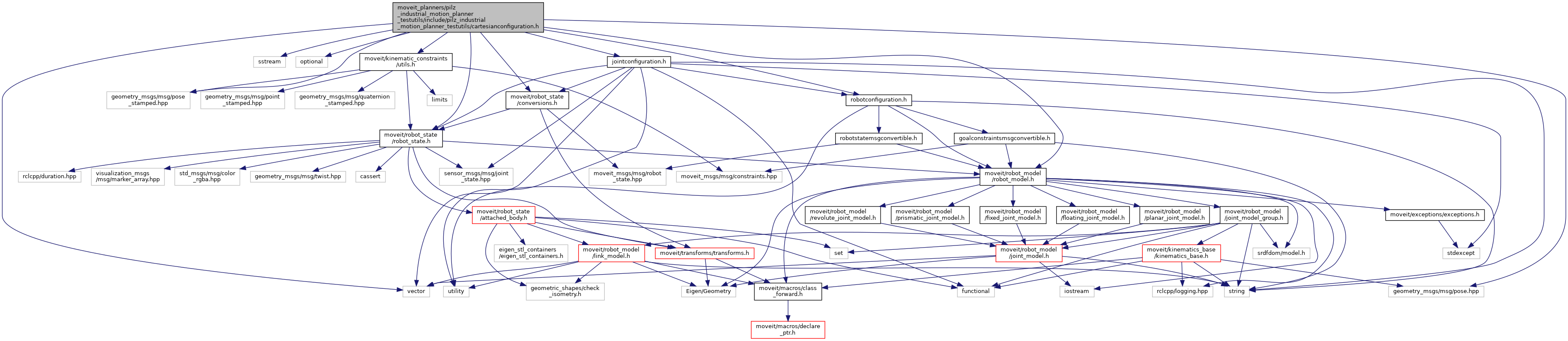
Include dependency graph for cartesianconfiguration.h:
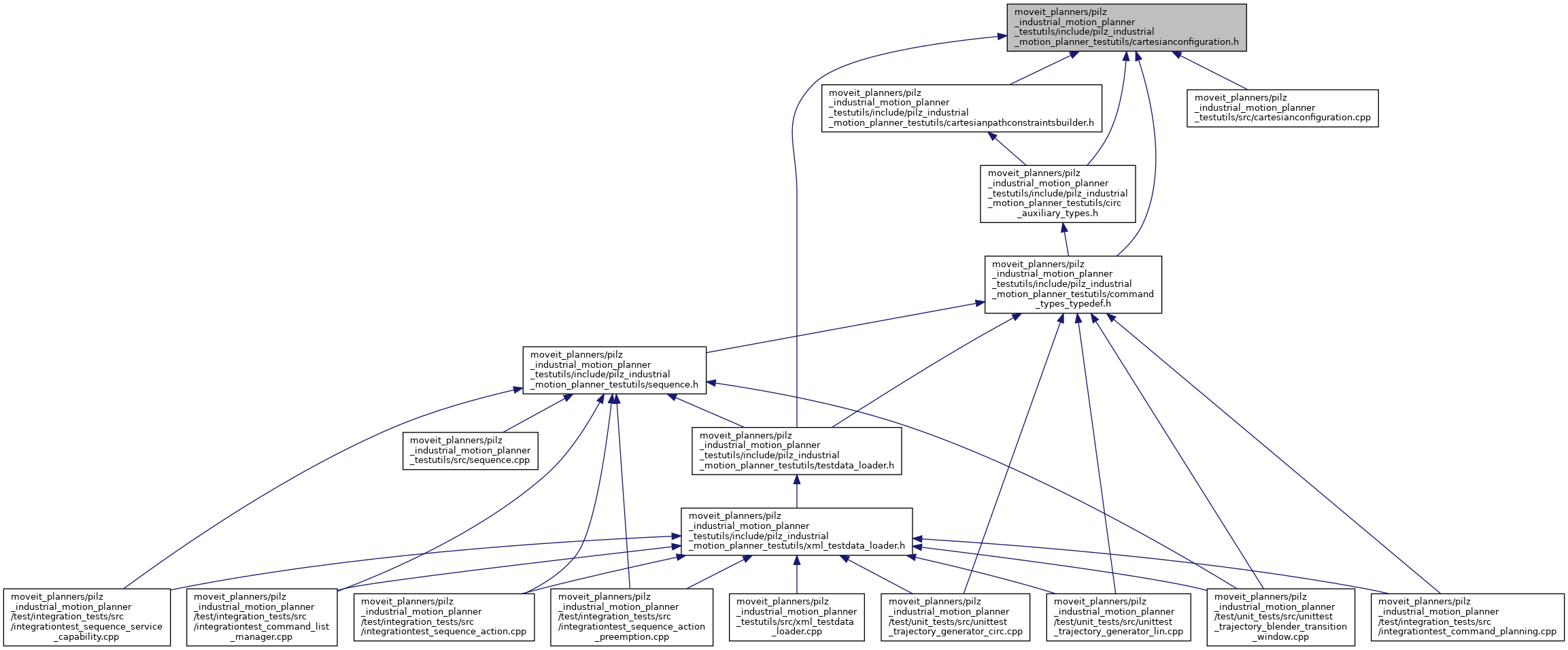
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner_testutils::CartesianConfiguration |
| Class to define a robot configuration in space with the help of cartesian coordinates. More... | |
Namespaces | |
| pilz_industrial_motion_planner_testutils | |
Functions | |
| std::ostream & | pilz_industrial_motion_planner_testutils::operator<< (std::ostream &, const CartesianConfiguration &) |