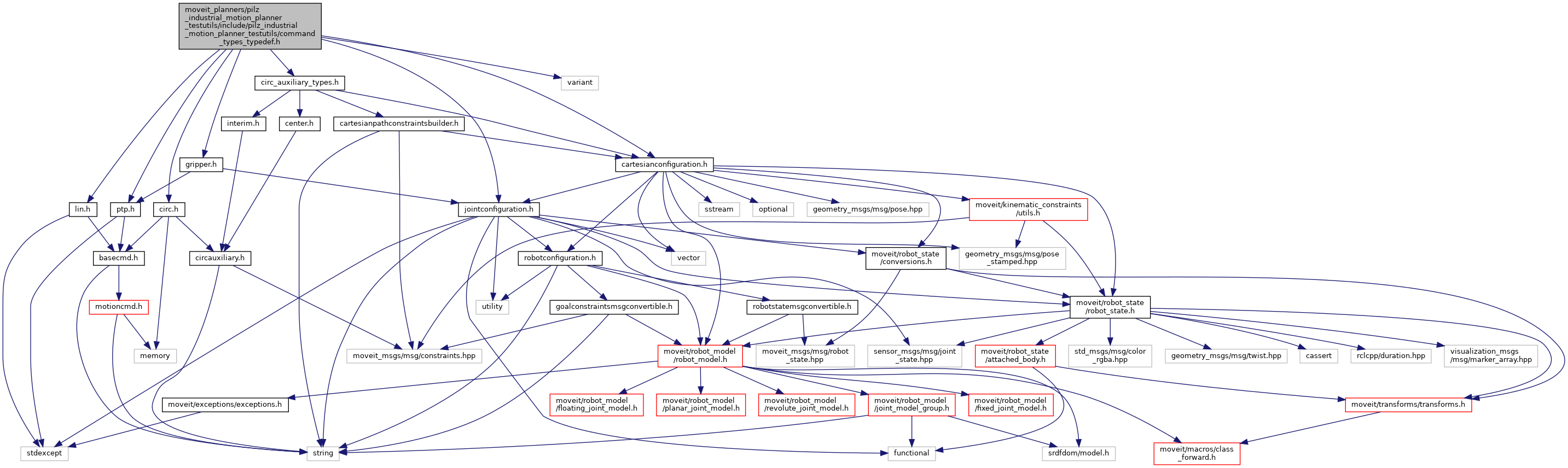
#include "ptp.h"#include "lin.h"#include "circ.h"#include "gripper.h"#include "jointconfiguration.h"#include "cartesianconfiguration.h"#include "circ_auxiliary_types.h"#include <variant>
Include dependency graph for command_types_typedef.h:
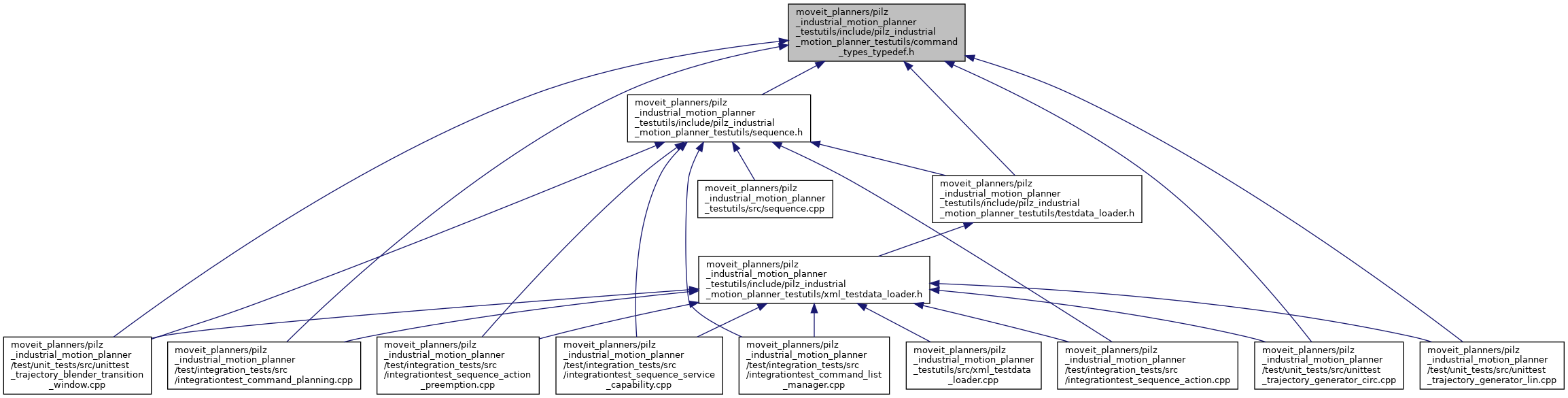
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| pilz_industrial_motion_planner_testutils | |
Typedefs | |
| typedef Ptp< JointConfiguration, JointConfiguration > | pilz_industrial_motion_planner_testutils::PtpJoint |
| typedef Ptp< JointConfiguration, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::PtpJointCart |
| typedef Ptp< CartesianConfiguration, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::PtpCart |
| typedef Lin< JointConfiguration, JointConfiguration > | pilz_industrial_motion_planner_testutils::LinJoint |
| typedef Lin< JointConfiguration, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::LinJointCart |
| typedef Lin< CartesianConfiguration, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::LinCart |
| typedef Circ< CartesianConfiguration, CartesianCenter, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::CircCenterCart |
| typedef Circ< CartesianConfiguration, CartesianInterim, CartesianConfiguration > | pilz_industrial_motion_planner_testutils::CircInterimCart |
| typedef Circ< JointConfiguration, CartesianCenter, JointConfiguration > | pilz_industrial_motion_planner_testutils::CircJointCenterCart |
| typedef Circ< JointConfiguration, CartesianInterim, JointConfiguration > | pilz_industrial_motion_planner_testutils::CircJointInterimCart |
| typedef std::variant< PtpJoint, PtpJointCart, PtpCart, LinJoint, LinCart, CircCenterCart, CircInterimCart, CircJointCenterCart, CircJointInterimCart, Gripper > | pilz_industrial_motion_planner_testutils::CmdVariant |