#include <pilz_industrial_motion_planner_testutils/jointconfiguration.h>#include <moveit/kinematic_constraints/utils.h>
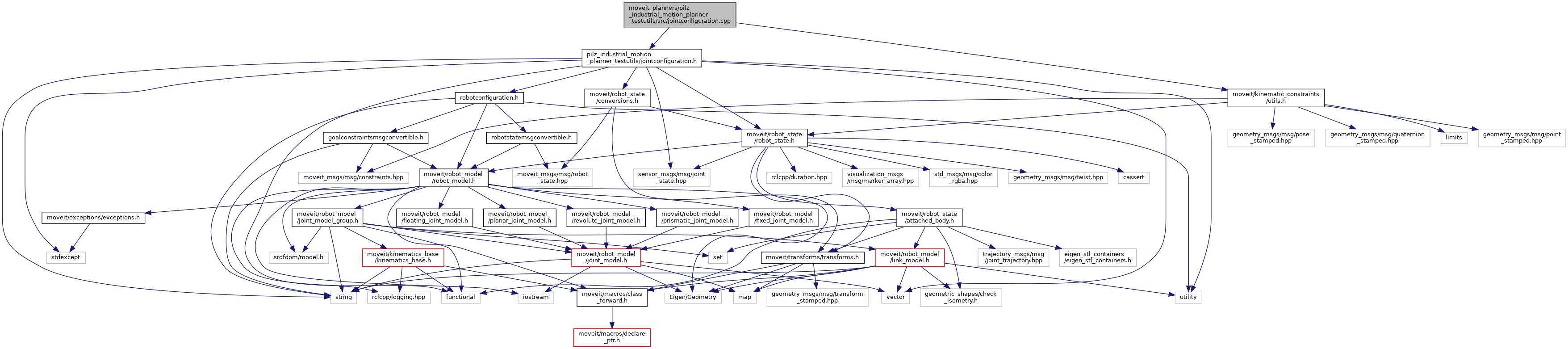
Include dependency graph for jointconfiguration.cpp:
Go to the source code of this file.
Namespaces | |
| pilz_industrial_motion_planner_testutils | |
Functions | |
| std::ostream & | pilz_industrial_motion_planner_testutils::operator<< (std::ostream &, const JointConfiguration &) |