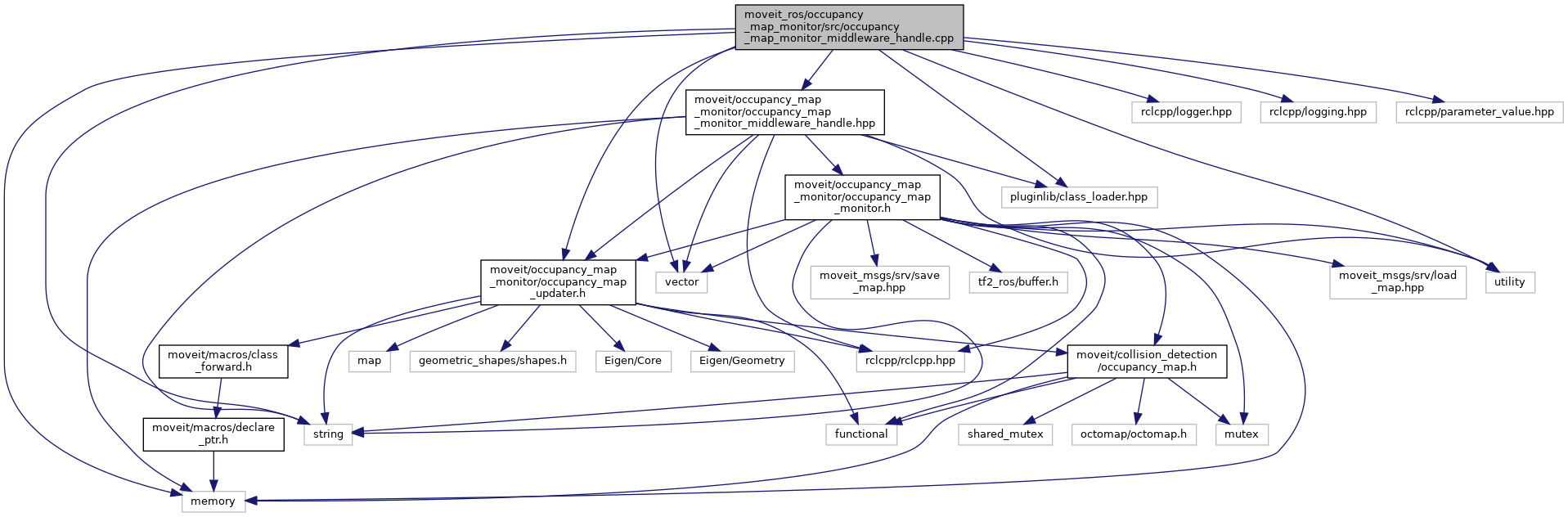
#include <moveit/occupancy_map_monitor/occupancy_map_monitor_middleware_handle.hpp>#include <moveit/occupancy_map_monitor/occupancy_map_updater.h>#include <pluginlib/class_loader.hpp>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>#include <rclcpp/parameter_value.hpp>#include <memory>#include <string>#include <utility>#include <vector>
Include dependency graph for occupancy_map_monitor_middleware_handle.cpp:
Go to the source code of this file.
Namespaces | |
| occupancy_map_monitor | |