#include <string>#include <unordered_map>
Include dependency graph for status_codes.h:
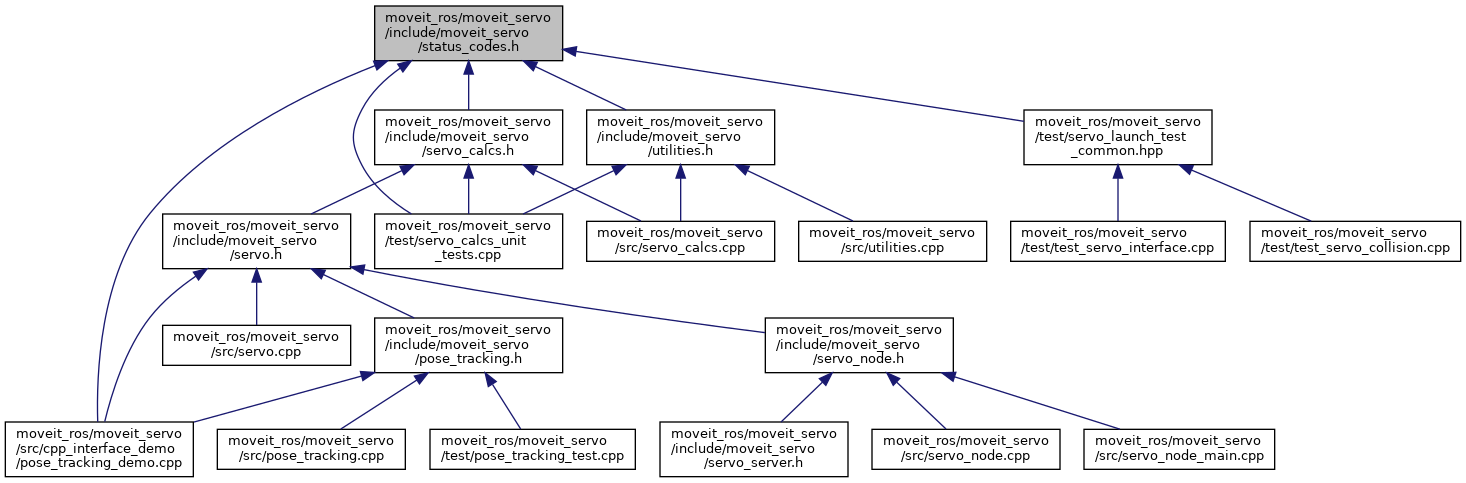
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| moveit_servo | |
Enumerations | |
| enum class | moveit_servo::StatusCode : int8_t { moveit_servo::INVALID = -1 , moveit_servo::NO_WARNING = 0 , moveit_servo::DECELERATE_FOR_APPROACHING_SINGULARITY = 1 , moveit_servo::HALT_FOR_SINGULARITY = 2 , moveit_servo::DECELERATE_FOR_COLLISION = 3 , moveit_servo::HALT_FOR_COLLISION = 4 , moveit_servo::JOINT_BOUND = 5 , moveit_servo::DECELERATE_FOR_LEAVING_SINGULARITY = 6 } |
Functions | |
| const std::unordered_map< StatusCode, std::string > | moveit_servo::SERVO_STATUS_CODE_MAP ({ { StatusCode::INVALID, "Invalid" }, { StatusCode::NO_WARNING, "No warnings" }, { StatusCode::DECELERATE_FOR_APPROACHING_SINGULARITY, "Moving closer to a singularity, decelerating" }, { StatusCode::HALT_FOR_SINGULARITY, "Very close to a singularity, emergency stop" }, { StatusCode::DECELERATE_FOR_COLLISION, "Close to a collision, decelerating" }, { StatusCode::HALT_FOR_COLLISION, "Collision detected, emergency stop" }, { StatusCode::JOINT_BOUND, "Close to a joint bound (position or velocity), halting" }, { StatusCode::DECELERATE_FOR_LEAVING_SINGULARITY, "Moving away from a singularity, decelerating" } }) |