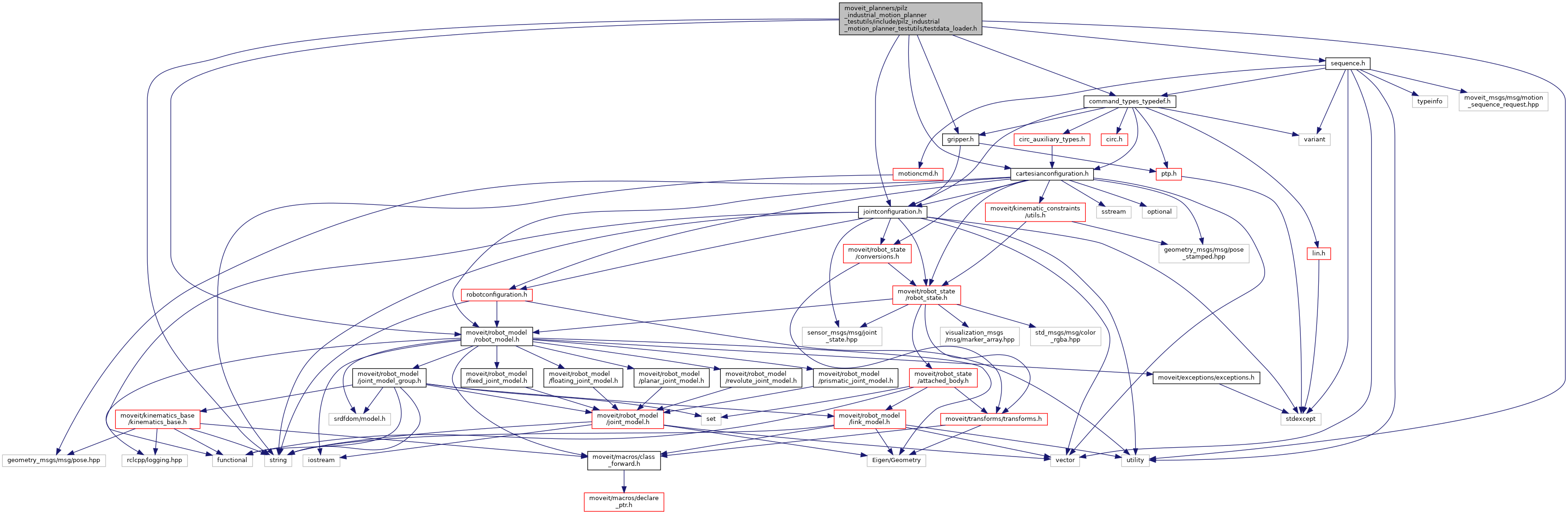
#include <string>#include <utility>#include <moveit/robot_model/robot_model.h>#include "jointconfiguration.h"#include "cartesianconfiguration.h"#include "command_types_typedef.h"#include "sequence.h"#include "gripper.h"
Include dependency graph for testdata_loader.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner_testutils::TestdataLoader |
| Abstract base class describing the interface to access test data like robot poses and robot commands. More... | |
Namespaces | |
| pilz_industrial_motion_planner_testutils | |
Typedefs | |
| using | pilz_industrial_motion_planner_testutils::TestdataLoaderUPtr = std::unique_ptr< TestdataLoader > |