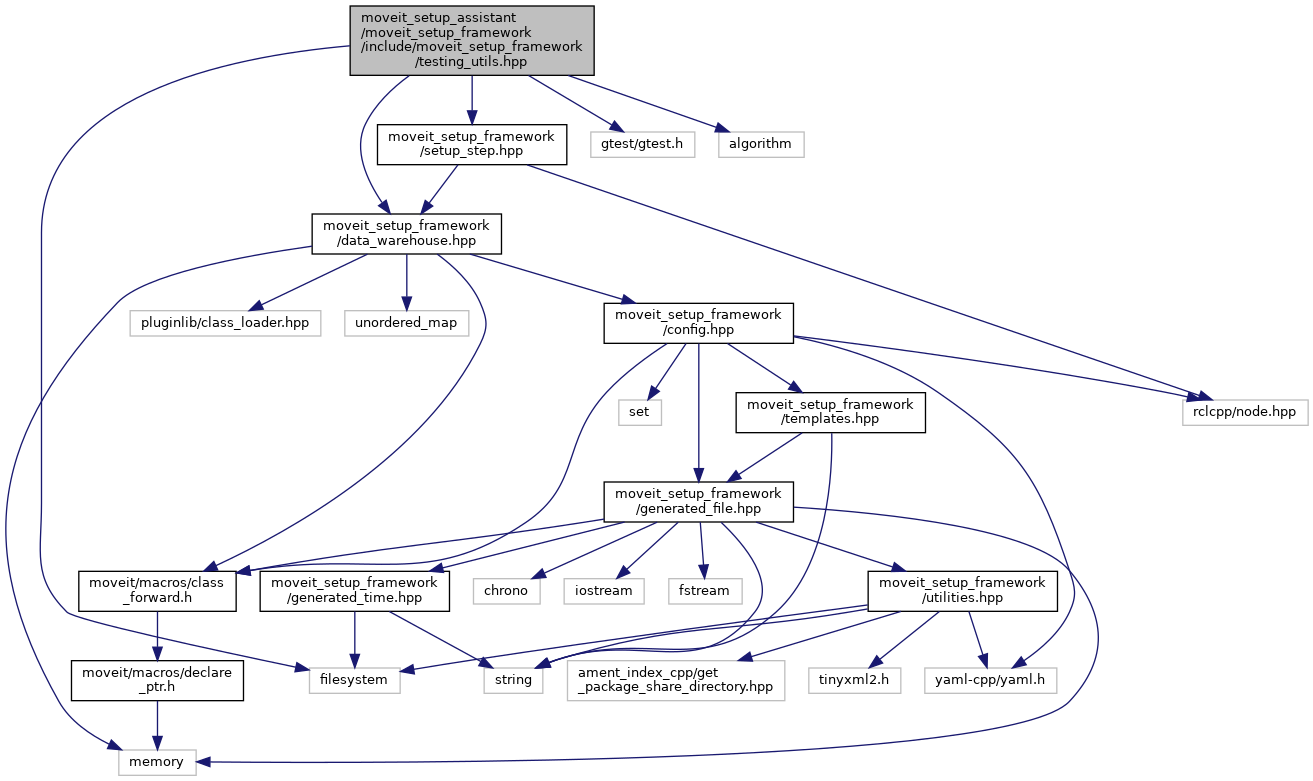
#include <moveit_setup_framework/data_warehouse.hpp>#include <moveit_setup_framework/setup_step.hpp>#include <gtest/gtest.h>#include <algorithm>#include <filesystem>
Include dependency graph for testing_utils.hpp:
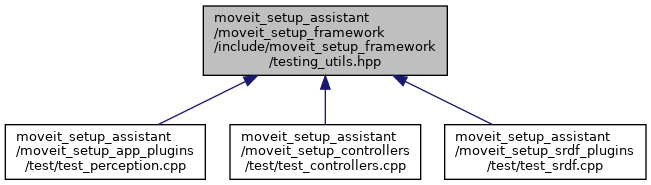
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | moveit_setup::MoveItSetupTest |
| Test environment with DataWarehouse setup and help for generating files in a temp dir. More... | |
Namespaces | |
| moveit_setup | |
Functions | |
| std::set< std::string > | moveit_setup::getKeys (const YAML::Node &node) |
| void | moveit_setup::expectYamlEquivalence (const YAML::Node &generated, const YAML::Node &reference, const std::filesystem::path &generated_path, const std::string &yaml_namespace="") |
| void | moveit_setup::expectYamlEquivalence (const std::filesystem::path &generated_path, const std::filesystem::path &reference_path) |