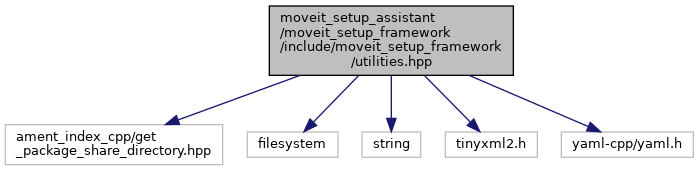
#include <ament_index_cpp/get_package_share_directory.hpp>#include <filesystem>#include <string>#include <tinyxml2.h>#include <yaml-cpp/yaml.h>
Include dependency graph for utilities.hpp:
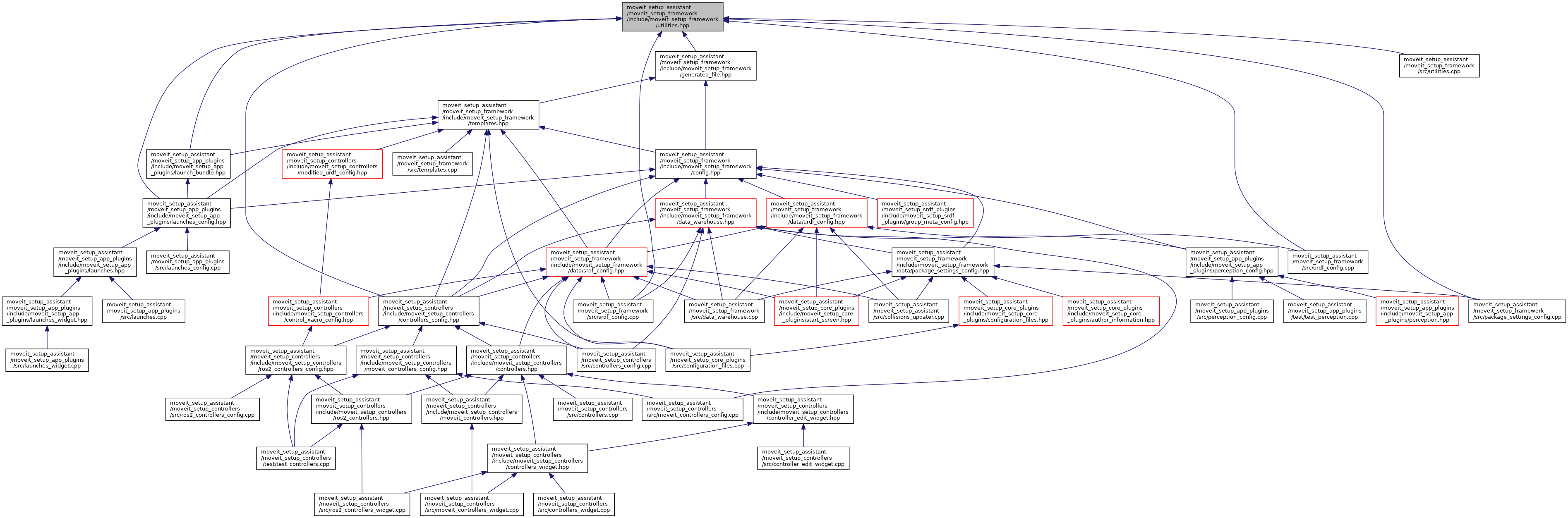
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | moveit_setup::XMLAttribute |
| Simple structure for easy xml creation. More... | |
Namespaces | |
| moveit_setup | |
Functions | |
| std::filesystem::path | moveit_setup::getSharePath (const std::string &package_name) |
| Return a path for the given package's share folder. More... | |
| bool | moveit_setup::createFolders (const std::filesystem::path &output_path) |
| Create folders (recursively) More... | |
| bool | moveit_setup::createParentFolders (const std::filesystem::path &file_path) |
| Create parent folders (recursively) More... | |
| bool | moveit_setup::extractPackageNameFromPath (const std::filesystem::path &path, std::string &package_name, std::filesystem::path &relative_filepath) |
| tinyxml2::XMLElement * | moveit_setup::uniqueInsert (tinyxml2::XMLDocument &doc, tinyxml2::XMLElement &element, const char *tag, const std::vector< XMLAttribute > &attributes={}, const char *text=nullptr) |
| Insert a new XML element with a given tag, attributes, and text. More... | |
| template<typename T > | |
| bool | moveit_setup::getYamlProperty (const YAML::Node &node, const std::string &key, T &storage, const T &default_value=T()) |
| bool | moveit_setup::getYamlProperty (const YAML::Node &node, const std::string &key, std::filesystem::path &storage, const std::string &default_value="") |