moveit2
The MoveIt Motion Planning Framework for ROS 2.
Loading...
Searching...
No Matches
moveit_planners
pilz_industrial_motion_planner_testutils
include
pilz_industrial_motion_planner_testutils
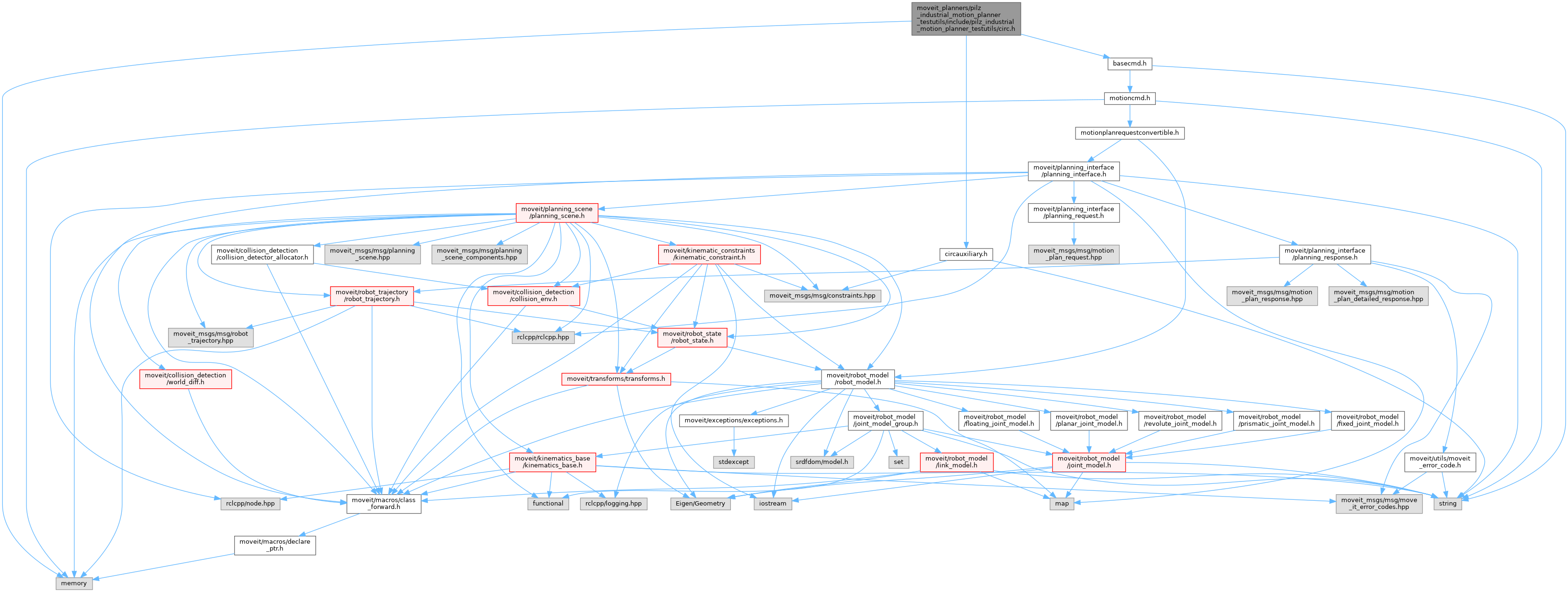
circ.h File Reference
#include <
pilz_industrial_motion_planner_testutils/circ.hpp
>
Include dependency graph for circ.h:
Go to the source code of this file.
Generated by
1.9.8