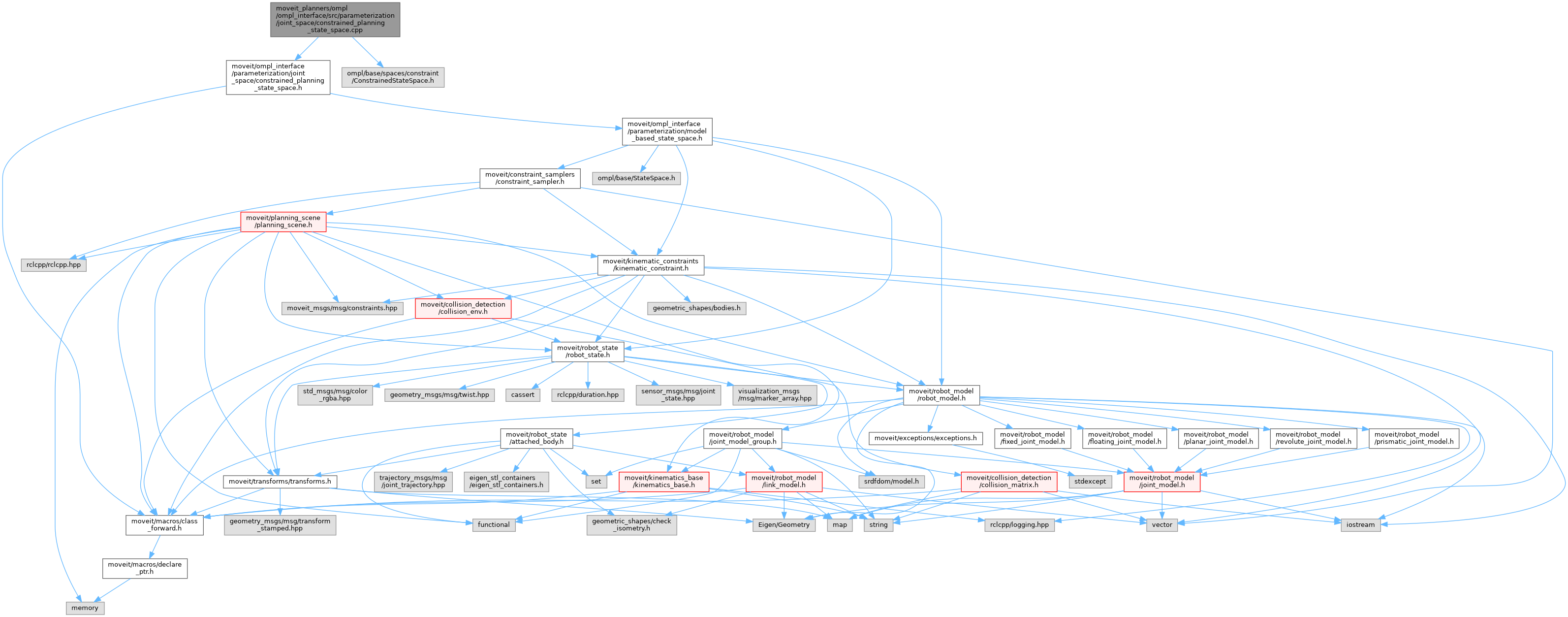
#include <moveit/ompl_interface/parameterization/joint_space/constrained_planning_state_space.hpp>#include <ompl/base/spaces/constraint/ConstrainedStateSpace.h>
Include dependency graph for constrained_planning_state_space.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | ompl_interface |
| The MoveIt interface to OMPL. | |