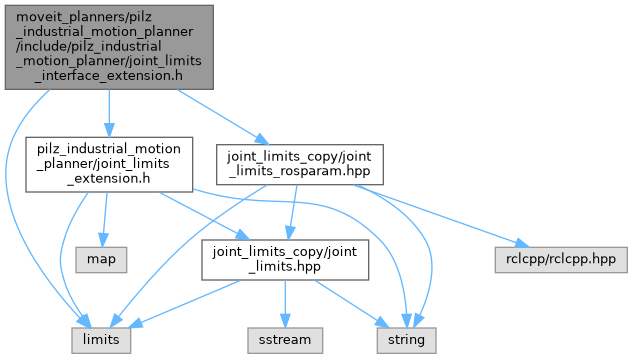
#include <pilz_industrial_motion_planner/joint_limits_interface_extension.hpp>
Go to the source code of this file.