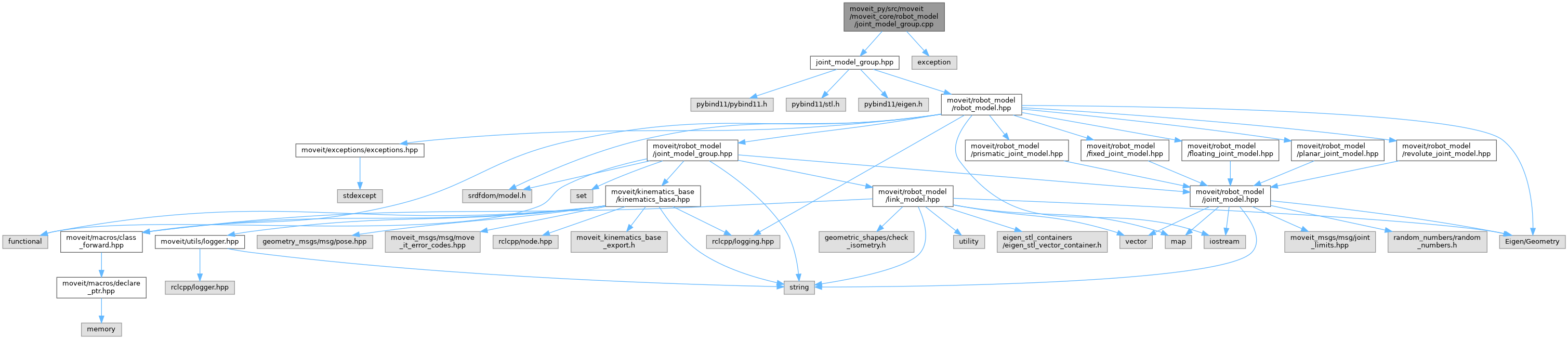
Include dependency graph for joint_model_group.cpp:
Go to the source code of this file.
Namespaces | |
| moveit_py | |
| moveit_py::bind_robot_model | |
Functions | |
| bool | moveit_py::bind_robot_model::satisfiesPositionBounds (const moveit::core::JointModelGroup *jmg, const Eigen::VectorXd &joint_positions, const double margin) |
| void | moveit_py::bind_robot_model::initJointModelGroup (py::module &m) |