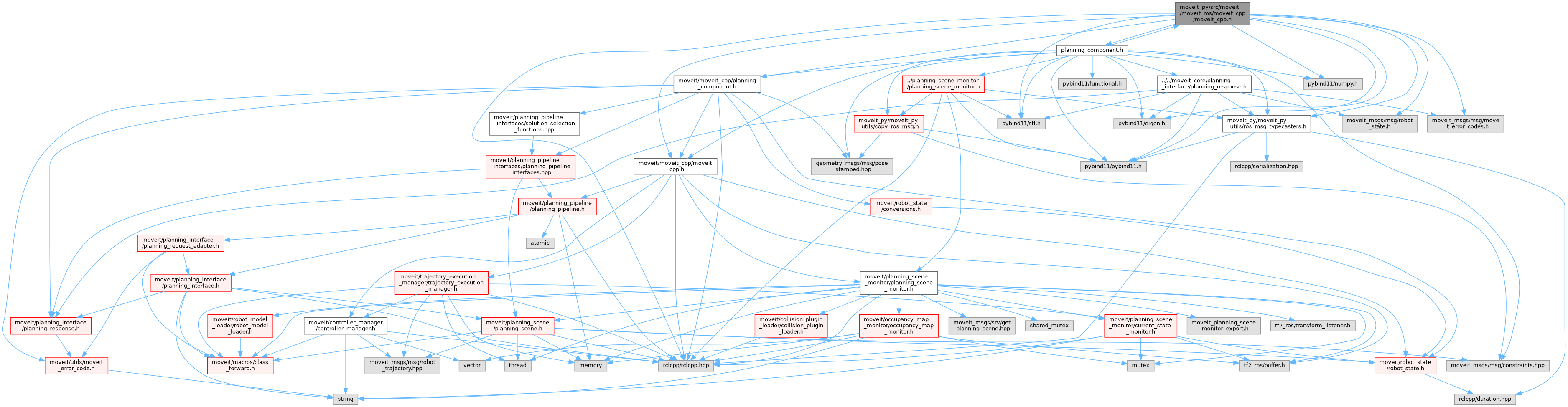
#include <pybind11/pybind11.h>#include <pybind11/numpy.h>#include <pybind11/eigen.h>#include <pybind11/stl.h>#include <moveit_msgs/msg/robot_state.h>#include <moveit_msgs/msg/move_it_error_codes.h>#include <moveit_py/moveit_py_utils/ros_msg_typecasters.h>#include <moveit/moveit_cpp/moveit_cpp.h>#include <moveit/moveit_cpp/planning_component.h>#include <rclcpp/rclcpp.hpp>#include "planning_component.h"
Include dependency graph for moveit_cpp.h:
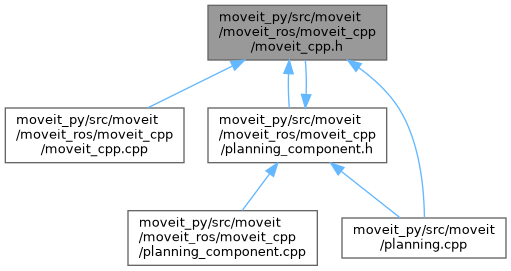
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | moveit_py |
| namespace | moveit_py::bind_moveit_cpp |
Functions | |
| void | moveit_py::bind_moveit_cpp::initMoveitPy (py::module &m) |