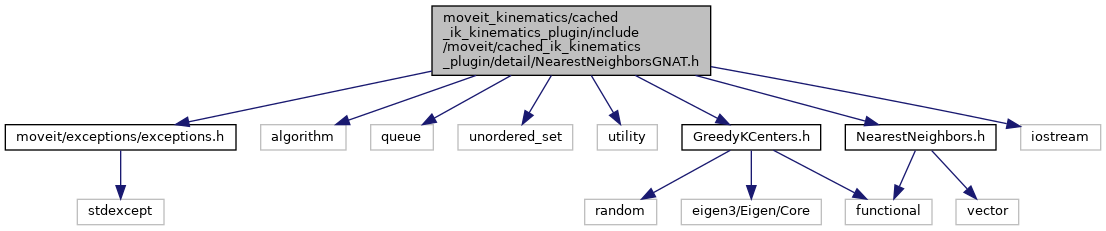
#include <moveit/exceptions/exceptions.h>#include <algorithm>#include <queue>#include <unordered_set>#include <utility>#include "GreedyKCenters.h"#include "NearestNeighbors.h"#include <iostream>
Include dependency graph for NearestNeighborsGNAT.h:
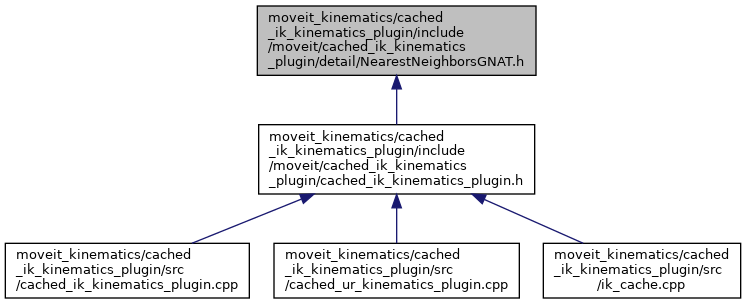
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cached_ik_kinematics_plugin::NearestNeighborsGNAT< _T > |
| Geometric Near-neighbor Access Tree (GNAT), a data structure for nearest neighbor search. More... | |
| class | cached_ik_kinematics_plugin::NearestNeighborsGNAT< _T >::Node |
Namespaces | |
| cached_ik_kinematics_plugin | |