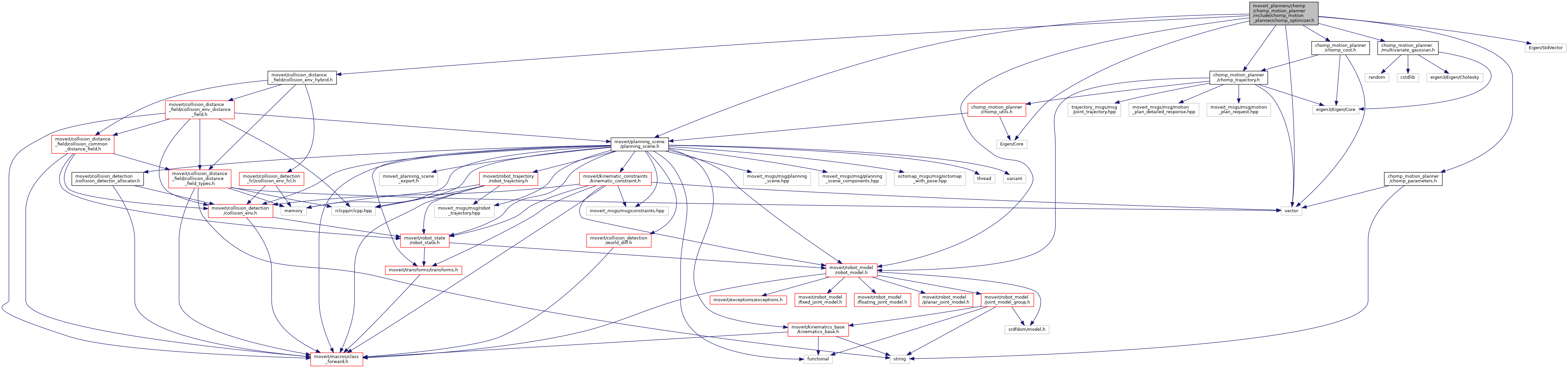
#include <chomp_motion_planner/chomp_cost.h>#include <chomp_motion_planner/chomp_parameters.h>#include <chomp_motion_planner/chomp_trajectory.h>#include <chomp_motion_planner/multivariate_gaussian.h>#include <moveit/collision_distance_field/collision_env_hybrid.h>#include <moveit/planning_scene/planning_scene.h>#include <moveit/robot_model/robot_model.h>#include <Eigen/Core>#include <Eigen/StdVector>#include <vector>
Include dependency graph for chomp_optimizer.h:
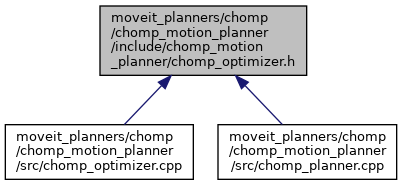
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | chomp::ChompOptimizer |
Namespaces | |
| chomp | |