A model of a mimic joint. Mimic joints are typically unactuated joints that are constrained to follow the motion of another joint. The constraint is linear, i.e. joint_angle_constrained_joint = joint_angle_mimicked_joint*multiplier + offset. More...
#include <joint_mimic.hpp>
Public Member Functions | |
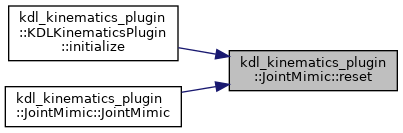
| JointMimic () | |
| void | reset (unsigned int index) |
Public Attributes | |
| double | offset |
| Offset for this joint value from the joint that it mimics. More... | |
| double | multiplier |
| Multiplier for this joint value from the joint that it mimics. More... | |
| unsigned int | map_index |
| Index of the joint that this joint mimics in the vector of active degrees of freedom. More... | |
| std::string | joint_name |
| Name of this joint. More... | |
| bool | active |
| If true, this joint is an active DOF and not a mimic joint. More... | |
Detailed Description
A model of a mimic joint. Mimic joints are typically unactuated joints that are constrained to follow the motion of another joint. The constraint is linear, i.e. joint_angle_constrained_joint = joint_angle_mimicked_joint*multiplier + offset.
Definition at line 45 of file joint_mimic.hpp.
Constructor & Destructor Documentation
◆ JointMimic()
|
inline |

Member Function Documentation
◆ reset()
|
inline |
Member Data Documentation
◆ active
| bool kdl_kinematics_plugin::JointMimic::active |
If true, this joint is an active DOF and not a mimic joint.
Definition at line 62 of file joint_mimic.hpp.
◆ joint_name
| std::string kdl_kinematics_plugin::JointMimic::joint_name |
Name of this joint.
Definition at line 60 of file joint_mimic.hpp.
◆ map_index
| unsigned int kdl_kinematics_plugin::JointMimic::map_index |
Index of the joint that this joint mimics in the vector of active degrees of freedom.
Definition at line 58 of file joint_mimic.hpp.
◆ multiplier
| double kdl_kinematics_plugin::JointMimic::multiplier |
Multiplier for this joint value from the joint that it mimics.
Definition at line 56 of file joint_mimic.hpp.
◆ offset
| double kdl_kinematics_plugin::JointMimic::offset |
Offset for this joint value from the joint that it mimics.
Definition at line 54 of file joint_mimic.hpp.
The documentation for this class was generated from the following file:
- moveit_kinematics/kdl_kinematics_plugin/include/moveit/kdl_kinematics_plugin/joint_mimic.hpp