|
| def | parseSRDF (self) |
| |
| def | __init__ (self) |
| |
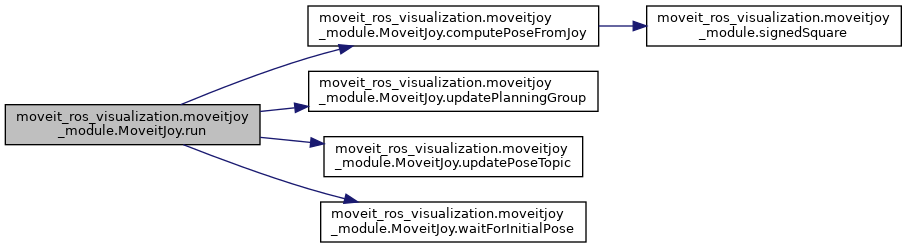
| def | updatePlanningGroup (self, next_index) |
| |
| def | updatePoseTopic (self, next_index, wait=True) |
| |
| def | markerCB (self, msg) |
| |
| def | waitForInitialPose (self, next_topic, timeout=None) |
| |
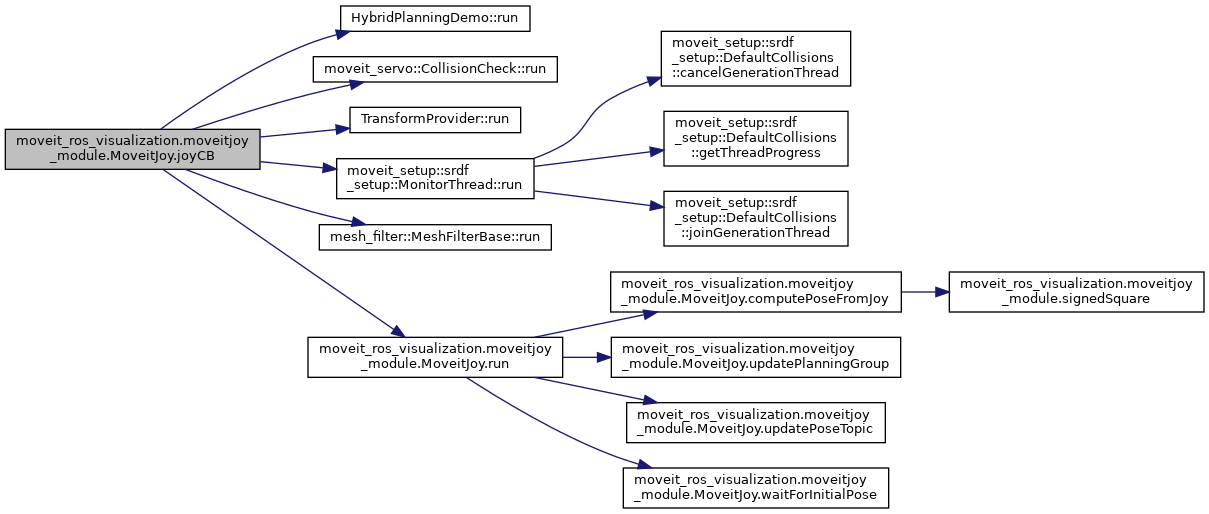
| def | joyCB (self, msg) |
| |
| def | computePoseFromJoy (self, pre_pose, status) |
| |
| def | run (self, status) |
| |
Definition at line 288 of file moveitjoy_module.py.
◆ __init__()
| def moveit_ros_visualization.moveitjoy_module.MoveitJoy.__init__ |
( |
|
self | ) |
|
◆ computePoseFromJoy()
| def moveit_ros_visualization.moveitjoy_module.MoveitJoy.computePoseFromJoy |
( |
|
self, |
|
|
|
pre_pose, |
|
|
|
status |
|
) |
| |
◆ joyCB()
| def moveit_ros_visualization.moveitjoy_module.MoveitJoy.joyCB |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ markerCB()
| def moveit_ros_visualization.moveitjoy_module.MoveitJoy.markerCB |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ parseSRDF()
| def moveit_ros_visualization.moveitjoy_module.MoveitJoy.parseSRDF |
( |
|
self | ) |
|
◆ run()
| def moveit_ros_visualization.moveitjoy_module.MoveitJoy.run |
( |
|
self, |
|
|
|
status |
|
) |
| |
◆ updatePlanningGroup()
| def moveit_ros_visualization.moveitjoy_module.MoveitJoy.updatePlanningGroup |
( |
|
self, |
|
|
|
next_index |
|
) |
| |
◆ updatePoseTopic()
| def moveit_ros_visualization.moveitjoy_module.MoveitJoy.updatePoseTopic |
( |
|
self, |
|
|
|
next_index, |
|
|
|
wait = True |
|
) |
| |
◆ waitForInitialPose()
| def moveit_ros_visualization.moveitjoy_module.MoveitJoy.waitForInitialPose |
( |
|
self, |
|
|
|
next_topic, |
|
|
|
timeout = None |
|
) |
| |
◆ counter
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.counter |
◆ current_eef_index
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.current_eef_index |
◆ current_planning_group_index
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.current_planning_group_index |
◆ current_pose_topic
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.current_pose_topic |
◆ execute_pub
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.execute_pub |
◆ frame_id
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.frame_id |
◆ history
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.history |
◆ initial_poses
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.initial_poses |
◆ initialize_poses
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.initialize_poses |
◆ initialized
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.initialized |
◆ interactive_marker_sub
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.interactive_marker_sub |
◆ joy_pose_pub
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.joy_pose_pub |
◆ marker_lock
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.marker_lock |
◆ plan_group_pub
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.plan_group_pub |
◆ plan_pub
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.plan_pub |
◆ planning_groups
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.planning_groups |
◆ planning_groups_keys
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.planning_groups_keys |
◆ planning_groups_tips
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.planning_groups_tips |
◆ pose_pub
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.pose_pub |
◆ pre_pose
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.pre_pose |
◆ prev_time
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.prev_time |
◆ sub
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.sub |
◆ tf_listener
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.tf_listener |
◆ update_goal_state_pub
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.update_goal_state_pub |
◆ update_start_state_pub
| moveit_ros_visualization.moveitjoy_module.MoveitJoy.update_start_state_pub |
The documentation for this class was generated from the following file: