#include <planning_scene_display.h>
Definition at line 71 of file planning_scene_display.h.
◆ PlanningSceneDisplay()
| moveit_rviz_plugin::PlanningSceneDisplay::PlanningSceneDisplay |
( |
bool |
listen_to_planning_scene = true, |
|
|
bool |
show_scene_robot = true |
|
) |
| |
◆ ~PlanningSceneDisplay()
| moveit_rviz_plugin::PlanningSceneDisplay::~PlanningSceneDisplay |
( |
| ) |
|
|
override |
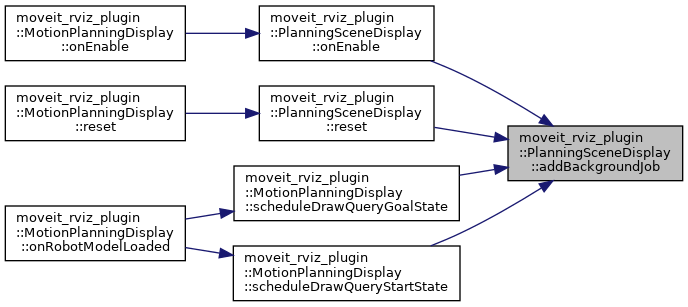
◆ addBackgroundJob()
| void moveit_rviz_plugin::PlanningSceneDisplay::addBackgroundJob |
( |
const std::function< void()> & |
job, |
|
|
const std::string & |
name |
|
) |
| |
Queue this function call for execution within the background thread All jobs are queued and processed in order by a single background thread.
Definition at line 234 of file planning_scene_display.cpp.
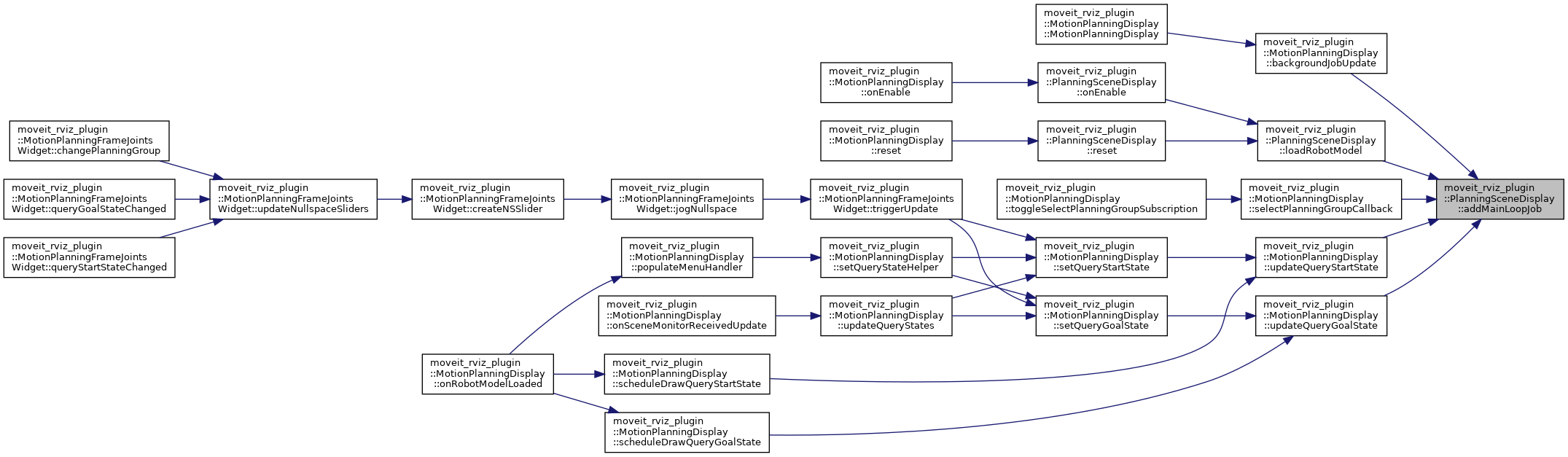
◆ addMainLoopJob()
| void moveit_rviz_plugin::PlanningSceneDisplay::addMainLoopJob |
( |
const std::function< void()> & |
job | ) |
|
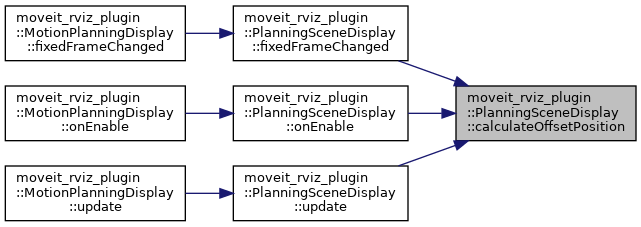
◆ calculateOffsetPosition()
| void moveit_rviz_plugin::PlanningSceneDisplay::calculateOffsetPosition |
( |
| ) |
|
|
protected |
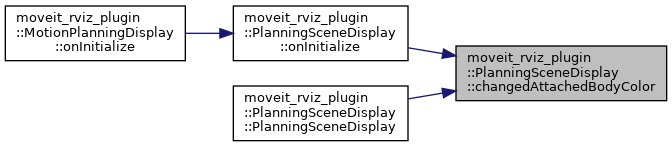
◆ changedAttachedBodyColor
| void moveit_rviz_plugin::PlanningSceneDisplay::changedAttachedBodyColor |
( |
| ) |
|
|
protectedvirtualslot |
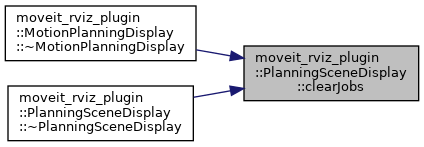
◆ clearJobs()
| void moveit_rviz_plugin::PlanningSceneDisplay::clearJobs |
( |
| ) |
|
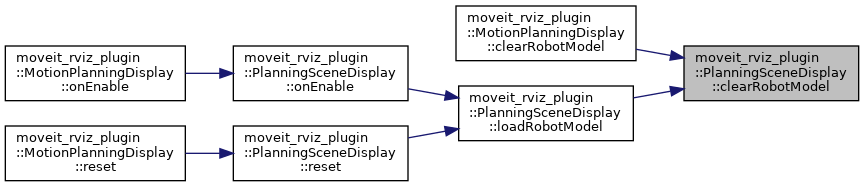
◆ clearRobotModel()
| void moveit_rviz_plugin::PlanningSceneDisplay::clearRobotModel |
( |
| ) |
|
|
protectedvirtual |
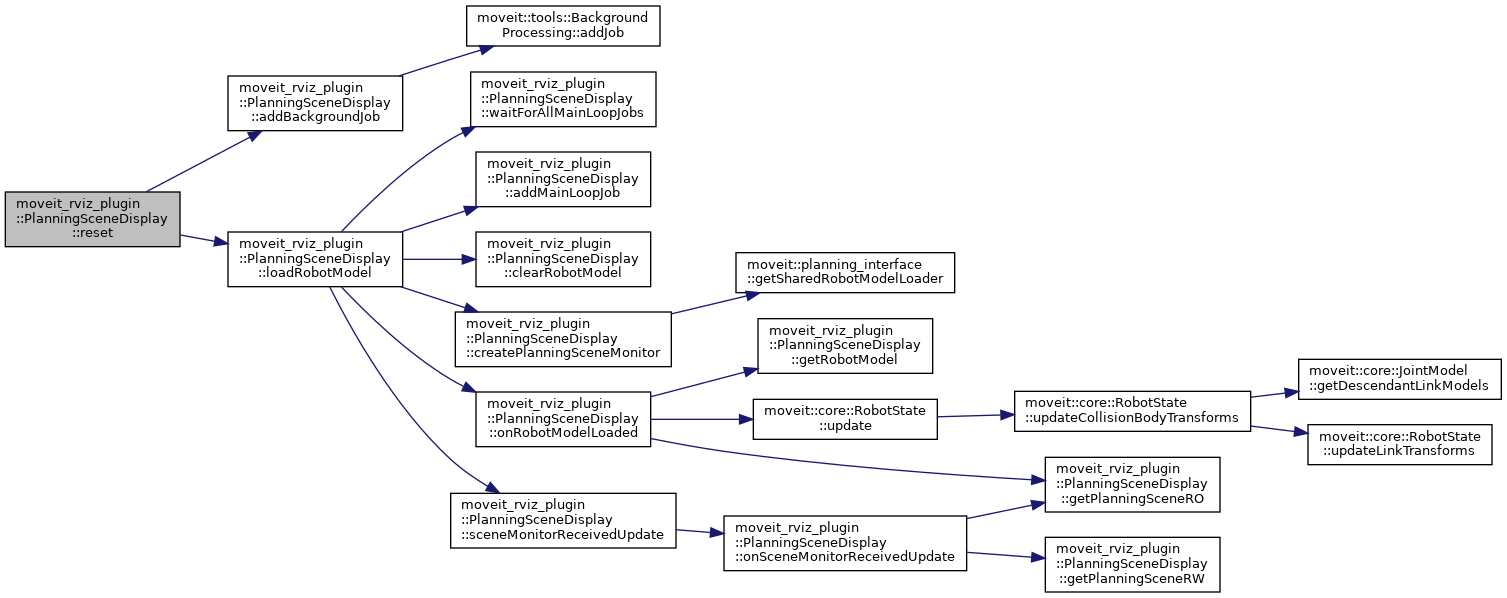
◆ createPlanningSceneMonitor()
| planning_scene_monitor::PlanningSceneMonitorPtr moveit_rviz_plugin::PlanningSceneDisplay::createPlanningSceneMonitor |
( |
| ) |
|
|
protectedvirtual |
This function constructs a new planning scene. Probably this should be called in a background thread as it may take some time to complete its execution
Definition at line 519 of file planning_scene_display.cpp.
◆ executeMainLoopJobs()
| void moveit_rviz_plugin::PlanningSceneDisplay::executeMainLoopJobs |
( |
| ) |
|
|
protected |
◆ fixedFrameChanged()
| void moveit_rviz_plugin::PlanningSceneDisplay::fixedFrameChanged |
( |
| ) |
|
|
overrideprotected |
◆ getMoveGroupNS()
| const std::string moveit_rviz_plugin::PlanningSceneDisplay::getMoveGroupNS |
( |
| ) |
const |
◆ getPlanningSceneMonitor()
| const planning_scene_monitor::PlanningSceneMonitorPtr & moveit_rviz_plugin::PlanningSceneDisplay::getPlanningSceneMonitor |
( |
| ) |
|
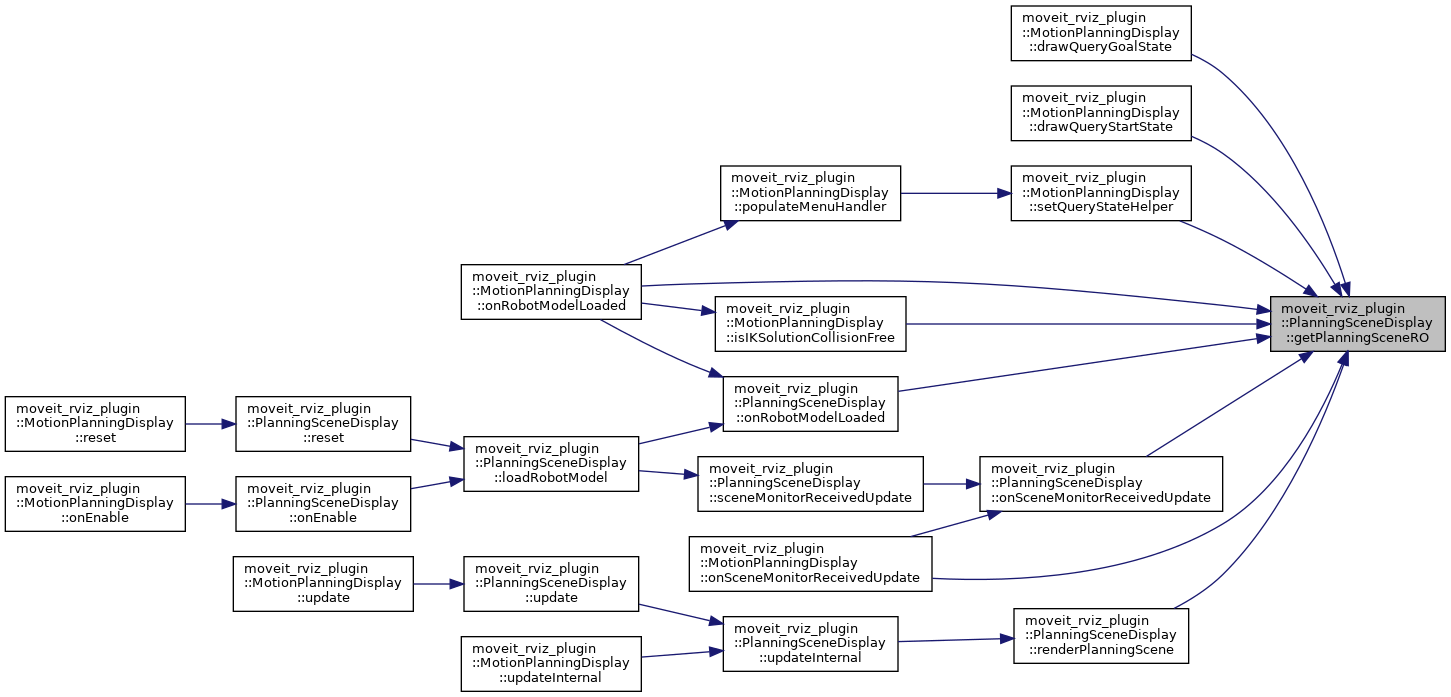
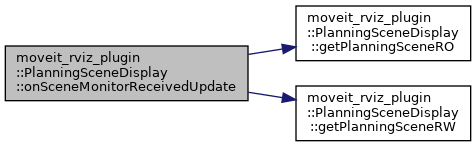
◆ getPlanningSceneRO()
◆ getPlanningSceneRW()
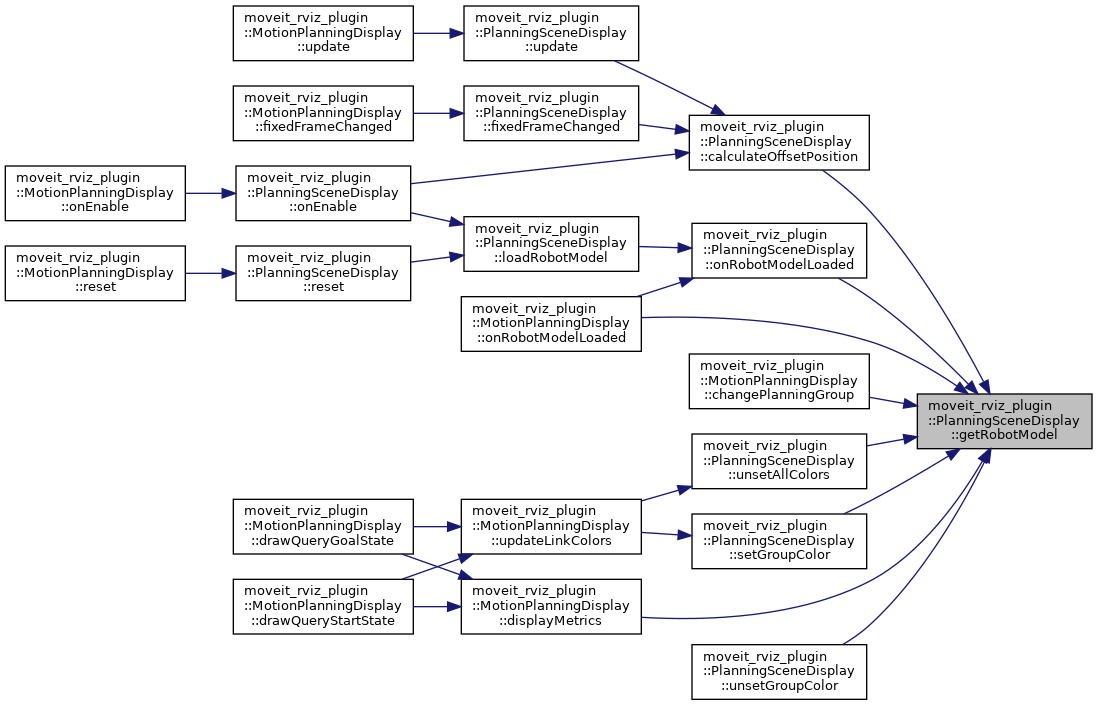
◆ getRobotModel()
| const moveit::core::RobotModelConstPtr & moveit_rviz_plugin::PlanningSceneDisplay::getRobotModel |
( |
| ) |
const |
◆ load()
| void moveit_rviz_plugin::PlanningSceneDisplay::load |
( |
const rviz_common::Config & |
config | ) |
|
|
override |
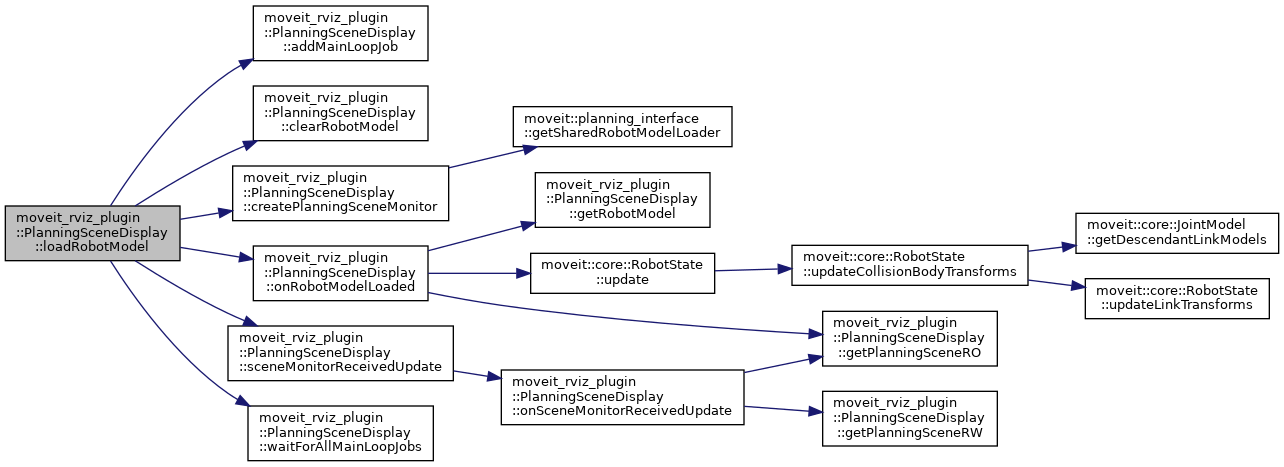
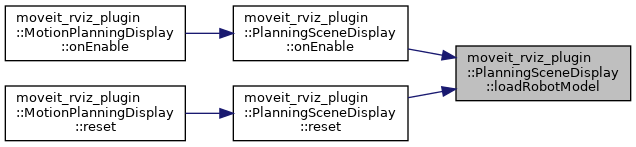
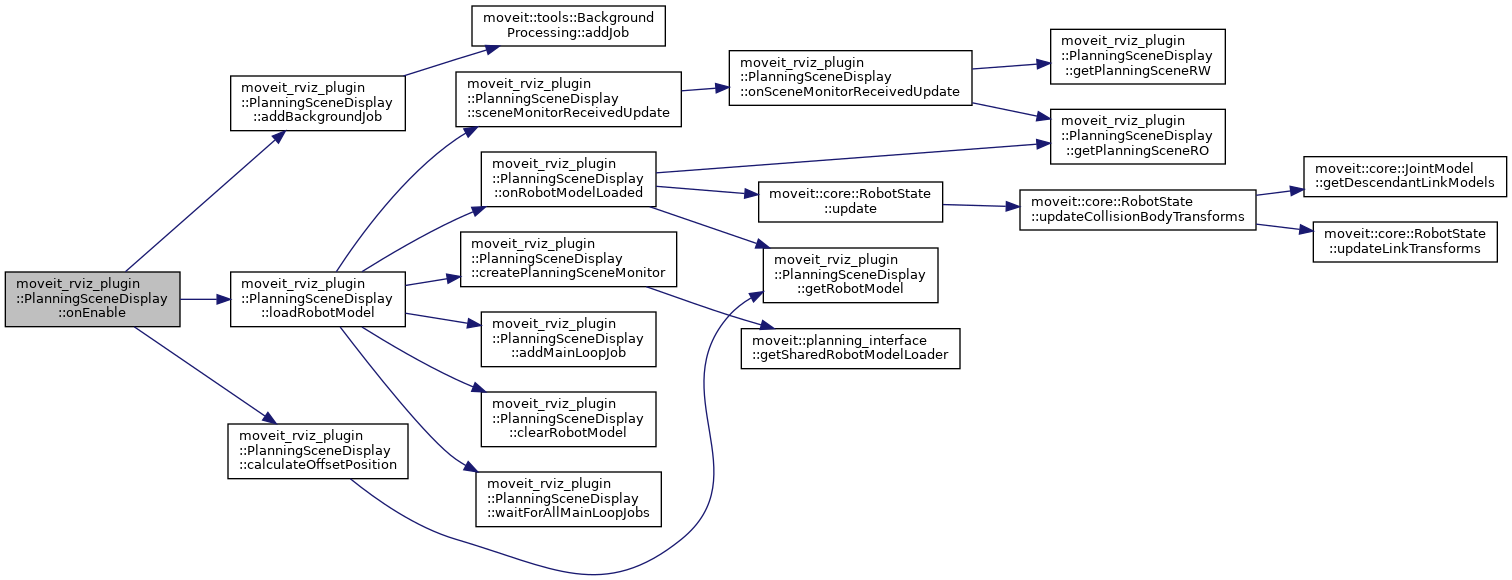
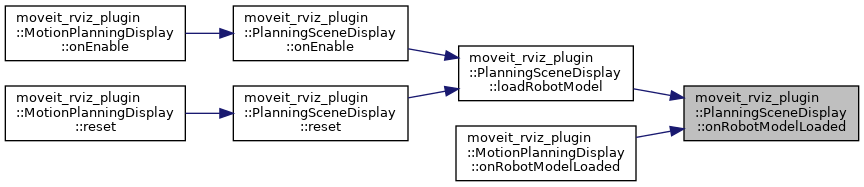
◆ loadRobotModel()
| void moveit_rviz_plugin::PlanningSceneDisplay::loadRobotModel |
( |
| ) |
|
|
protected |
This function reloads the robot model and reinitializes the PlanningSceneMonitor It can be called either from the Main Loop or from a Background thread
Definition at line 533 of file planning_scene_display.cpp.
◆ onDisable()
| void moveit_rviz_plugin::PlanningSceneDisplay::onDisable |
( |
| ) |
|
|
overrideprotected |
◆ onEnable()
| void moveit_rviz_plugin::PlanningSceneDisplay::onEnable |
( |
| ) |
|
|
overrideprotected |
◆ onInitialize()
| void moveit_rviz_plugin::PlanningSceneDisplay::onInitialize |
( |
| ) |
|
|
overrideprotected |
◆ onNewPlanningSceneState()
| void moveit_rviz_plugin::PlanningSceneDisplay::onNewPlanningSceneState |
( |
| ) |
|
|
protectedvirtual |
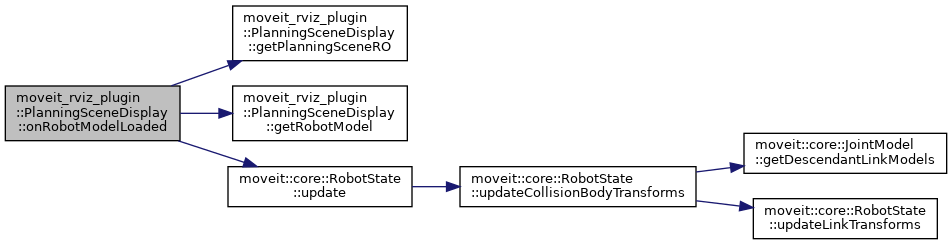
◆ onRobotModelLoaded()
| void moveit_rviz_plugin::PlanningSceneDisplay::onRobotModelLoaded |
( |
| ) |
|
|
protectedvirtual |
◆ onSceneMonitorReceivedUpdate()
◆ queueRenderSceneGeometry()
| void moveit_rviz_plugin::PlanningSceneDisplay::queueRenderSceneGeometry |
( |
| ) |
|
◆ renderPlanningScene()
| void moveit_rviz_plugin::PlanningSceneDisplay::renderPlanningScene |
( |
| ) |
|
|
protected |
◆ reset()
| void moveit_rviz_plugin::PlanningSceneDisplay::reset |
( |
| ) |
|
|
override |
◆ save()
| void moveit_rviz_plugin::PlanningSceneDisplay::save |
( |
rviz_common::Config |
config | ) |
const |
|
override |
◆ sceneMonitorReceivedUpdate()
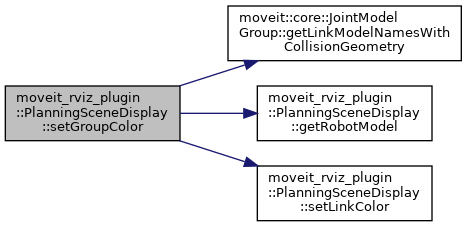
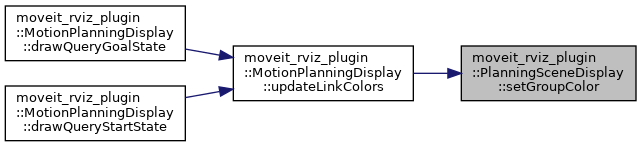
◆ setGroupColor()
| void moveit_rviz_plugin::PlanningSceneDisplay::setGroupColor |
( |
rviz_default_plugins::robot::Robot * |
robot, |
|
|
const std::string & |
group_name, |
|
|
const QColor & |
color |
|
) |
| |
|
protected |
◆ setLinkColor() [1/2]
| void moveit_rviz_plugin::PlanningSceneDisplay::setLinkColor |
( |
const std::string & |
link_name, |
|
|
const QColor & |
color |
|
) |
| |
◆ setLinkColor() [2/2]
| void moveit_rviz_plugin::PlanningSceneDisplay::setLinkColor |
( |
rviz_default_plugins::robot::Robot * |
robot, |
|
|
const std::string & |
link_name, |
|
|
const QColor & |
color |
|
) |
| |
|
protected |
◆ spawnBackgroundJob()
| void moveit_rviz_plugin::PlanningSceneDisplay::spawnBackgroundJob |
( |
const std::function< void()> & |
job | ) |
|
Directly spawn a (detached) background thread for execution of this function call Should be used, when order of processing is not relevant / job can run in parallel. Must be used, when job will be blocking. Using addBackgroundJob() in this case will block other queued jobs as well
Definition at line 239 of file planning_scene_display.cpp.
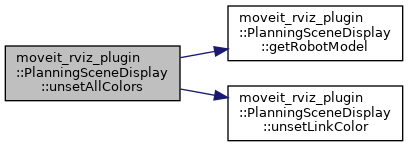
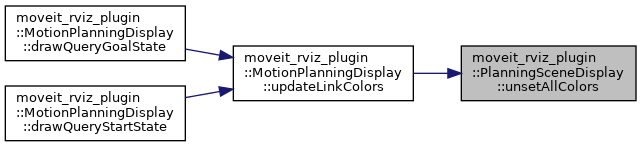
◆ unsetAllColors()
| void moveit_rviz_plugin::PlanningSceneDisplay::unsetAllColors |
( |
rviz_default_plugins::robot::Robot * |
robot | ) |
|
|
protected |
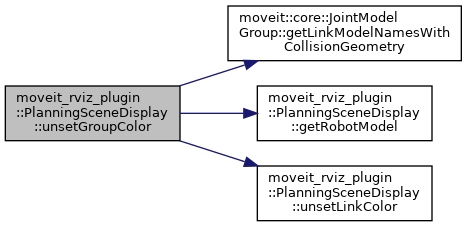
◆ unsetGroupColor()
| void moveit_rviz_plugin::PlanningSceneDisplay::unsetGroupColor |
( |
rviz_default_plugins::robot::Robot * |
robot, |
|
|
const std::string & |
group_name |
|
) |
| |
|
protected |
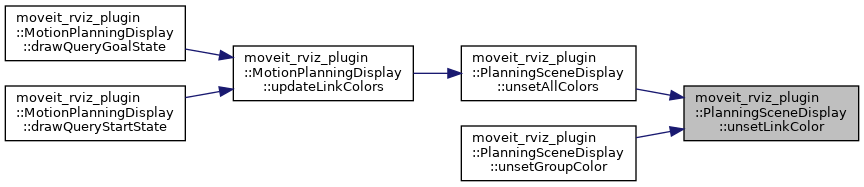
◆ unsetLinkColor() [1/2]
| void moveit_rviz_plugin::PlanningSceneDisplay::unsetLinkColor |
( |
const std::string & |
link_name | ) |
|
◆ unsetLinkColor() [2/2]
| void moveit_rviz_plugin::PlanningSceneDisplay::unsetLinkColor |
( |
rviz_default_plugins::robot::Robot * |
robot, |
|
|
const std::string & |
link_name |
|
) |
| |
|
protected |
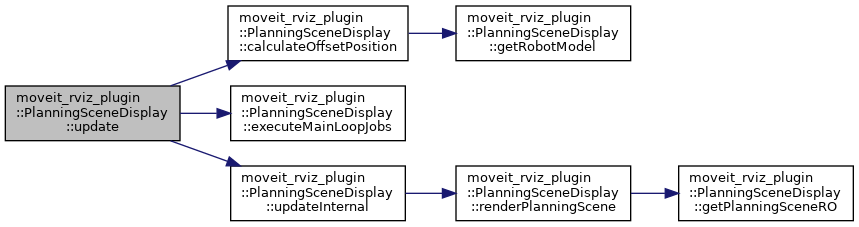
◆ update()
| void moveit_rviz_plugin::PlanningSceneDisplay::update |
( |
float |
wall_dt, |
|
|
float |
ros_dt |
|
) |
| |
|
override |
◆ updateInternal()
| void moveit_rviz_plugin::PlanningSceneDisplay::updateInternal |
( |
float |
wall_dt, |
|
|
float |
ros_dt |
|
) |
| |
|
protectedvirtual |
◆ waitForAllMainLoopJobs()
| void moveit_rviz_plugin::PlanningSceneDisplay::waitForAllMainLoopJobs |
( |
| ) |
|
◆ waitForCurrentRobotState()
| bool moveit_rviz_plugin::PlanningSceneDisplay::waitForCurrentRobotState |
( |
const rclcpp::Time & |
t | ) |
|
◆ attached_body_color_property_
| rviz_common::properties::ColorProperty* moveit_rviz_plugin::PlanningSceneDisplay::attached_body_color_property_ |
|
protected |
◆ background_process_
◆ current_scene_time_
| float moveit_rviz_plugin::PlanningSceneDisplay::current_scene_time_ |
|
protected |
◆ main_loop_jobs_
| std::deque<std::function<void()> > moveit_rviz_plugin::PlanningSceneDisplay::main_loop_jobs_ |
|
protected |
◆ main_loop_jobs_empty_condition_
| std::condition_variable moveit_rviz_plugin::PlanningSceneDisplay::main_loop_jobs_empty_condition_ |
|
protected |
◆ main_loop_jobs_lock_
| std::mutex moveit_rviz_plugin::PlanningSceneDisplay::main_loop_jobs_lock_ |
|
protected |
◆ move_group_ns_property_
| rviz_common::properties::StringProperty* moveit_rviz_plugin::PlanningSceneDisplay::move_group_ns_property_ |
|
protected |
◆ node_
| rclcpp::Node::SharedPtr moveit_rviz_plugin::PlanningSceneDisplay::node_ |
|
protected |
◆ octree_coloring_property_
| rviz_common::properties::EnumProperty* moveit_rviz_plugin::PlanningSceneDisplay::octree_coloring_property_ |
|
protected |
◆ octree_render_property_
| rviz_common::properties::EnumProperty* moveit_rviz_plugin::PlanningSceneDisplay::octree_render_property_ |
|
protected |
◆ planning_scene_monitor_
| planning_scene_monitor::PlanningSceneMonitorPtr moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_monitor_ |
|
protected |
◆ planning_scene_needs_render_
| bool moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_needs_render_ |
|
protected |
◆ planning_scene_node_
| Ogre::SceneNode* moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_node_ |
|
protected |
◆ planning_scene_render_
| PlanningSceneRenderPtr moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_render_ |
|
protected |
◆ planning_scene_robot_
| RobotStateVisualizationPtr moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_robot_ |
|
protected |
◆ planning_scene_topic_property_
| rviz_common::properties::RosTopicProperty* moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_topic_property_ |
|
protected |
◆ robot_alpha_property_
| rviz_common::properties::FloatProperty* moveit_rviz_plugin::PlanningSceneDisplay::robot_alpha_property_ |
|
protected |
◆ robot_category_
| rviz_common::properties::Property* moveit_rviz_plugin::PlanningSceneDisplay::robot_category_ |
|
protected |
◆ robot_description_property_
| rviz_common::properties::StringProperty* moveit_rviz_plugin::PlanningSceneDisplay::robot_description_property_ |
|
protected |
◆ robot_model_loading_lock_
| std::mutex moveit_rviz_plugin::PlanningSceneDisplay::robot_model_loading_lock_ |
|
protected |
◆ robot_state_needs_render_
| bool moveit_rviz_plugin::PlanningSceneDisplay::robot_state_needs_render_ |
|
protected |
◆ scene_alpha_property_
| rviz_common::properties::FloatProperty* moveit_rviz_plugin::PlanningSceneDisplay::scene_alpha_property_ |
|
protected |
◆ scene_category_
| rviz_common::properties::Property* moveit_rviz_plugin::PlanningSceneDisplay::scene_category_ |
|
protected |
◆ scene_color_property_
| rviz_common::properties::ColorProperty* moveit_rviz_plugin::PlanningSceneDisplay::scene_color_property_ |
|
protected |
◆ scene_display_time_property_
| rviz_common::properties::FloatProperty* moveit_rviz_plugin::PlanningSceneDisplay::scene_display_time_property_ |
|
protected |
◆ scene_enabled_property_
| rviz_common::properties::BoolProperty* moveit_rviz_plugin::PlanningSceneDisplay::scene_enabled_property_ |
|
protected |
◆ scene_name_property_
| rviz_common::properties::StringProperty* moveit_rviz_plugin::PlanningSceneDisplay::scene_name_property_ |
|
protected |
◆ scene_robot_collision_enabled_property_
| rviz_common::properties::BoolProperty* moveit_rviz_plugin::PlanningSceneDisplay::scene_robot_collision_enabled_property_ |
|
protected |
◆ scene_robot_visual_enabled_property_
| rviz_common::properties::BoolProperty* moveit_rviz_plugin::PlanningSceneDisplay::scene_robot_visual_enabled_property_ |
|
protected |
The documentation for this class was generated from the following files: