#include <robot_state_display.h>
Definition at line 65 of file robot_state_display.h.
◆ RobotStateDisplay()
| moveit_rviz_plugin::RobotStateDisplay::RobotStateDisplay |
( |
| ) |
|
◆ ~RobotStateDisplay()
| moveit_rviz_plugin::RobotStateDisplay::~RobotStateDisplay |
( |
| ) |
|
|
overridedefault |
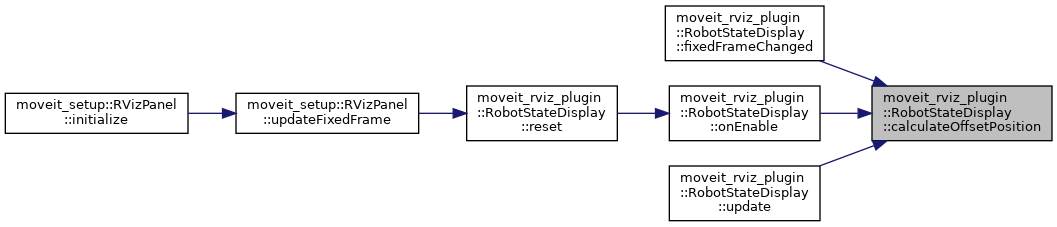
◆ calculateOffsetPosition()
| void moveit_rviz_plugin::RobotStateDisplay::calculateOffsetPosition |
( |
| ) |
|
|
protected |
Set the scene node's position, given the target frame and the planning frame.
Definition at line 473 of file robot_state_display.cpp.
◆ fixedFrameChanged()
| void moveit_rviz_plugin::RobotStateDisplay::fixedFrameChanged |
( |
| ) |
|
|
overrideprotected |
◆ getRobotModel()
| const moveit::core::RobotModelConstPtr& moveit_rviz_plugin::RobotStateDisplay::getRobotModel |
( |
| ) |
const |
|
inline |
◆ initializeLoader()
| void moveit_rviz_plugin::RobotStateDisplay::initializeLoader |
( |
| ) |
|
|
protected |
◆ load()
| void moveit_rviz_plugin::RobotStateDisplay::load |
( |
const rviz_common::Config & |
config | ) |
|
|
override |
◆ loadRobotModel()
| void moveit_rviz_plugin::RobotStateDisplay::loadRobotModel |
( |
| ) |
|
|
protected |
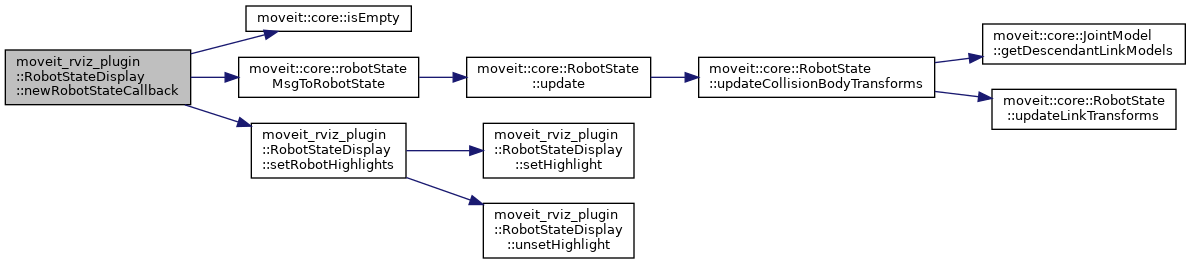
◆ newRobotStateCallback()
| void moveit_rviz_plugin::RobotStateDisplay::newRobotStateCallback |
( |
const moveit_msgs::msg::DisplayRobotState::ConstSharedPtr & |
state | ) |
|
|
protected |
◆ onDisable()
| void moveit_rviz_plugin::RobotStateDisplay::onDisable |
( |
| ) |
|
|
overrideprotected |
◆ onEnable()
| void moveit_rviz_plugin::RobotStateDisplay::onEnable |
( |
| ) |
|
|
overrideprotected |
◆ onInitialize()
| void moveit_rviz_plugin::RobotStateDisplay::onInitialize |
( |
| ) |
|
|
overrideprotected |
◆ reset()
| void moveit_rviz_plugin::RobotStateDisplay::reset |
( |
| ) |
|
|
override |
◆ setHighlight()
| void moveit_rviz_plugin::RobotStateDisplay::setHighlight |
( |
const std::string & |
link_name, |
|
|
const std_msgs::msg::ColorRGBA & |
color |
|
) |
| |
|
protected |
◆ setLinkColor() [1/2]
| void moveit_rviz_plugin::RobotStateDisplay::setLinkColor |
( |
const std::string & |
link_name, |
|
|
const QColor & |
color |
|
) |
| |
◆ setLinkColor() [2/2]
| void moveit_rviz_plugin::RobotStateDisplay::setLinkColor |
( |
rviz_default_plugins::robot::Robot * |
robot, |
|
|
const std::string & |
link_name, |
|
|
const QColor & |
color |
|
) |
| |
|
protected |
◆ setRobotHighlights()
| void moveit_rviz_plugin::RobotStateDisplay::setRobotHighlights |
( |
const moveit_msgs::msg::DisplayRobotState::_highlight_links_type & |
highlight_links | ) |
|
|
protected |
◆ setVisible
| void moveit_rviz_plugin::RobotStateDisplay::setVisible |
( |
bool |
visible | ) |
|
|
slot |
◆ unsetHighlight()
| void moveit_rviz_plugin::RobotStateDisplay::unsetHighlight |
( |
const std::string & |
link_name | ) |
|
|
protected |
◆ unsetLinkColor() [1/2]
| void moveit_rviz_plugin::RobotStateDisplay::unsetLinkColor |
( |
const std::string & |
link_name | ) |
|
◆ unsetLinkColor() [2/2]
| void moveit_rviz_plugin::RobotStateDisplay::unsetLinkColor |
( |
rviz_default_plugins::robot::Robot * |
robot, |
|
|
const std::string & |
link_name |
|
) |
| |
|
protected |
◆ update()
| void moveit_rviz_plugin::RobotStateDisplay::update |
( |
float |
wall_dt, |
|
|
float |
ros_dt |
|
) |
| |
|
override |
◆ attached_body_color_property_
| rviz_common::properties::ColorProperty* moveit_rviz_plugin::RobotStateDisplay::attached_body_color_property_ |
|
protected |
◆ enable_collision_visible_
| rviz_common::properties::BoolProperty* moveit_rviz_plugin::RobotStateDisplay::enable_collision_visible_ |
|
protected |
◆ enable_link_highlight_
| rviz_common::properties::BoolProperty* moveit_rviz_plugin::RobotStateDisplay::enable_link_highlight_ |
|
protected |
◆ enable_visual_visible_
| rviz_common::properties::BoolProperty* moveit_rviz_plugin::RobotStateDisplay::enable_visual_visible_ |
|
protected |
◆ highlights_
| std::map<std::string, std_msgs::msg::ColorRGBA> moveit_rviz_plugin::RobotStateDisplay::highlights_ |
|
protected |
◆ node_
| rclcpp::Node::SharedPtr moveit_rviz_plugin::RobotStateDisplay::node_ |
|
protected |
◆ rdf_loader_
| rdf_loader::RDFLoaderPtr moveit_rviz_plugin::RobotStateDisplay::rdf_loader_ |
|
protected |
◆ robot_
| RobotStateVisualizationPtr moveit_rviz_plugin::RobotStateDisplay::robot_ |
|
protected |
◆ robot_alpha_property_
| rviz_common::properties::FloatProperty* moveit_rviz_plugin::RobotStateDisplay::robot_alpha_property_ |
|
protected |
◆ robot_description_property_
| rviz_common::properties::StringProperty* moveit_rviz_plugin::RobotStateDisplay::robot_description_property_ |
|
protected |
◆ robot_model_
| moveit::core::RobotModelConstPtr moveit_rviz_plugin::RobotStateDisplay::robot_model_ |
|
protected |
◆ robot_state_
| moveit::core::RobotStatePtr moveit_rviz_plugin::RobotStateDisplay::robot_state_ |
|
protected |
◆ robot_state_subscriber_
| rclcpp::Subscription<moveit_msgs::msg::DisplayRobotState>::SharedPtr moveit_rviz_plugin::RobotStateDisplay::robot_state_subscriber_ |
|
protected |
◆ robot_state_topic_property_
| rviz_common::properties::RosTopicProperty* moveit_rviz_plugin::RobotStateDisplay::robot_state_topic_property_ |
|
protected |
◆ root_link_name_property_
| rviz_common::properties::StringProperty* moveit_rviz_plugin::RobotStateDisplay::root_link_name_property_ |
|
protected |
◆ show_all_links_
| rviz_common::properties::BoolProperty* moveit_rviz_plugin::RobotStateDisplay::show_all_links_ |
|
protected |
◆ update_state_
| bool moveit_rviz_plugin::RobotStateDisplay::update_state_ |
|
protected |
The documentation for this class was generated from the following files: