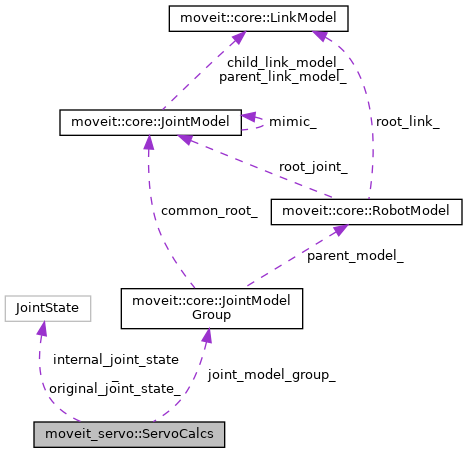
#include <servo_calcs.h>
Public Member Functions | |
| ServoCalcs (const rclcpp::Node::SharedPtr &node, const std::shared_ptr< const moveit_servo::ServoParameters > ¶meters, const planning_scene_monitor::PlanningSceneMonitorPtr &planning_scene_monitor) | |
| ~ServoCalcs () | |
| void | start () |
| Start the timer where we do work and publish outputs. More... | |
| bool | getCommandFrameTransform (Eigen::Isometry3d &transform) |
| bool | getCommandFrameTransform (geometry_msgs::msg::TransformStamped &transform) |
| bool | getEEFrameTransform (Eigen::Isometry3d &transform) |
| bool | getEEFrameTransform (geometry_msgs::msg::TransformStamped &transform) |
| void | setPaused (bool paused) |
| Pause or unpause processing servo commands while keeping the timers alive. More... | |
Protected Member Functions | |
| void | mainCalcLoop () |
| Run the main calculation loop. More... | |
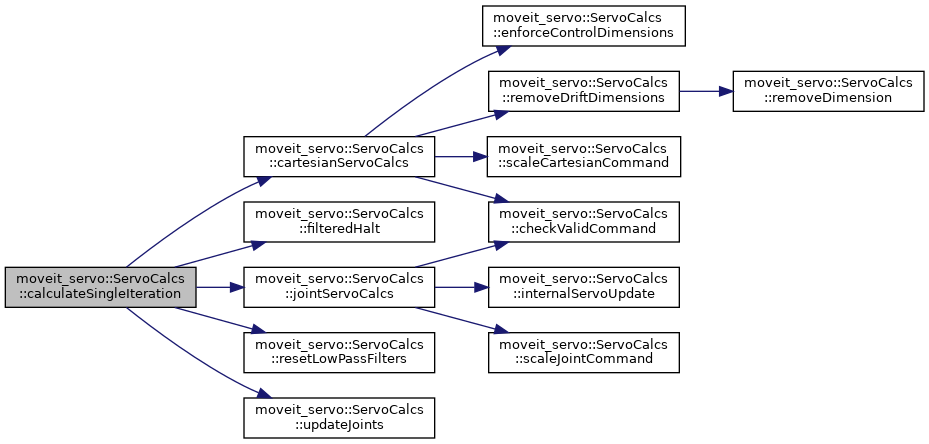
| void | calculateSingleIteration () |
| Do calculations for a single iteration. Publish one outgoing command. More... | |
| void | stop () |
| Stop the currently running thread. More... | |
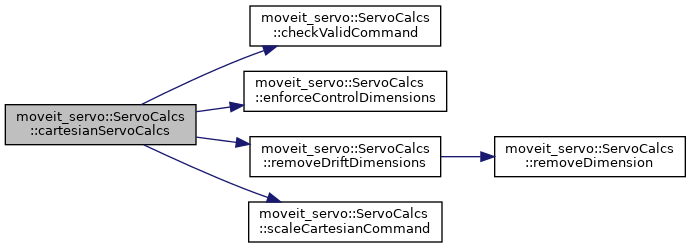
| bool | cartesianServoCalcs (geometry_msgs::msg::TwistStamped &cmd, trajectory_msgs::msg::JointTrajectory &joint_trajectory) |
| Do servoing calculations for Cartesian twist commands. More... | |
| bool | jointServoCalcs (const control_msgs::msg::JointJog &cmd, trajectory_msgs::msg::JointTrajectory &joint_trajectory) |
| Do servoing calculations for direct commands to a joint. More... | |
| void | updateJoints () |
| Parse the incoming joint msg for the joints of our MoveGroup. More... | |
| bool | checkValidCommand (const control_msgs::msg::JointJog &cmd) |
| bool | checkValidCommand (const geometry_msgs::msg::TwistStamped &cmd) |
| Eigen::VectorXd | scaleCartesianCommand (const geometry_msgs::msg::TwistStamped &command) |
| If incoming velocity commands are from a unitless joystick, scale them to physical units. Also, multiply by timestep to calculate a position change. More... | |
| Eigen::VectorXd | scaleJointCommand (const control_msgs::msg::JointJog &command) |
| If incoming velocity commands are from a unitless joystick, scale them to physical units. Also, multiply by timestep to calculate a position change. More... | |
| void | filteredHalt (trajectory_msgs::msg::JointTrajectory &joint_trajectory) |
| Come to a halt in a smooth way. Apply a smoothing plugin, if one is configured. More... | |
| void | suddenHalt (sensor_msgs::msg::JointState &joint_state, const std::vector< const moveit::core::JointModel * > &joints_to_halt) const |
| Suddenly halt for a joint limit or other critical issue. Is handled differently for position vs. velocity control. More... | |
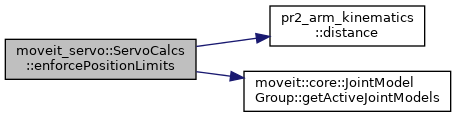
| std::vector< const moveit::core::JointModel * > | enforcePositionLimits (sensor_msgs::msg::JointState &joint_state) const |
| Avoid overshooting joint limits. More... | |
| void | composeJointTrajMessage (const sensor_msgs::msg::JointState &joint_state, trajectory_msgs::msg::JointTrajectory &joint_trajectory) |
| Compose the outgoing JointTrajectory message. More... | |
| void | resetLowPassFilters (const sensor_msgs::msg::JointState &joint_state) |
| Set the filters to the specified values. More... | |
| bool | internalServoUpdate (Eigen::ArrayXd &delta_theta, trajectory_msgs::msg::JointTrajectory &joint_trajectory, const ServoType servo_type) |
| Handles all aspects of the servoing after the desired joint commands are established Joint and Cartesian calcs feed into here Handles limit enforcement, internal state updated, collision scaling, and publishing the commands. More... | |
| bool | applyJointUpdate (const Eigen::ArrayXd &delta_theta, sensor_msgs::msg::JointState &joint_state) |
| Joint-wise update of a sensor_msgs::msg::JointState with given delta's Also filters and calculates the previous velocity. More... | |
| void | insertRedundantPointsIntoTrajectory (trajectory_msgs::msg::JointTrajectory &joint_trajectory, int count) const |
| Gazebo simulations have very strict message timestamp requirements. Satisfy Gazebo by stuffing multiple messages into one. More... | |
| void | removeDimension (Eigen::MatrixXd &matrix, Eigen::VectorXd &delta_x, unsigned int row_to_remove) const |
| void | removeDriftDimensions (Eigen::MatrixXd &matrix, Eigen::VectorXd &delta_x) |
| void | enforceControlDimensions (geometry_msgs::msg::TwistStamped &command) |
| void | jointStateCB (const sensor_msgs::msg::JointState::SharedPtr msg) |
| void | twistStampedCB (const geometry_msgs::msg::TwistStamped::ConstSharedPtr &msg) |
| void | jointCmdCB (const control_msgs::msg::JointJog::ConstSharedPtr &msg) |
| void | collisionVelocityScaleCB (const std_msgs::msg::Float64::ConstSharedPtr &msg) |
| void | changeDriftDimensions (const std::shared_ptr< moveit_msgs::srv::ChangeDriftDimensions::Request > &req, const std::shared_ptr< moveit_msgs::srv::ChangeDriftDimensions::Response > &res) |
| void | changeControlDimensions (const std::shared_ptr< moveit_msgs::srv::ChangeControlDimensions::Request > &req, const std::shared_ptr< moveit_msgs::srv::ChangeControlDimensions::Response > &res) |
| Start the main calculation timer. More... | |
| bool | resetServoStatus (const std::shared_ptr< std_srvs::srv::Empty::Request > &req, const std::shared_ptr< std_srvs::srv::Empty::Response > &res) |
| Service callback to reset Servo status, e.g. so the arm can move again after a collision. More... | |
| rcl_interfaces::msg::SetParametersResult | robotLinkCommandFrameCallback (const rclcpp::Parameter ¶meter) |
Protected Attributes | |
| std::shared_ptr< rclcpp::Node > | node_ |
| const std::shared_ptr< const moveit_servo::ServoParameters > | parameters_ |
| planning_scene_monitor::PlanningSceneMonitorPtr | planning_scene_monitor_ |
| int | zero_velocity_count_ = 0 |
| bool | wait_for_servo_commands_ = true |
| bool | updated_filters_ = false |
| bool | have_nonzero_twist_stamped_ = false |
| bool | have_nonzero_joint_command_ = false |
| bool | have_nonzero_command_ = false |
| geometry_msgs::msg::TwistStamped | twist_stamped_cmd_ |
| control_msgs::msg::JointJog | joint_servo_cmd_ |
| const moveit::core::JointModelGroup * | joint_model_group_ |
| moveit::core::RobotStatePtr | current_state_ |
| sensor_msgs::msg::JointState | internal_joint_state_ |
| sensor_msgs::msg::JointState | original_joint_state_ |
| std::map< std::string, std::size_t > | joint_state_name_map_ |
| std::shared_ptr< online_signal_smoothing::SmoothingBaseClass > | smoother_ |
| trajectory_msgs::msg::JointTrajectory::SharedPtr | last_sent_command_ |
| rclcpp::Subscription< sensor_msgs::msg::JointState >::SharedPtr | joint_state_sub_ |
| rclcpp::Subscription< geometry_msgs::msg::TwistStamped >::SharedPtr | twist_stamped_sub_ |
| rclcpp::Subscription< control_msgs::msg::JointJog >::SharedPtr | joint_cmd_sub_ |
| rclcpp::Subscription< std_msgs::msg::Float64 >::SharedPtr | collision_velocity_scale_sub_ |
| rclcpp::Publisher< std_msgs::msg::Int8 >::SharedPtr | status_pub_ |
| rclcpp::Publisher< trajectory_msgs::msg::JointTrajectory >::SharedPtr | trajectory_outgoing_cmd_pub_ |
| rclcpp::Publisher< std_msgs::msg::Float64MultiArray >::SharedPtr | multiarray_outgoing_cmd_pub_ |
| rclcpp::Service< moveit_msgs::srv::ChangeControlDimensions >::SharedPtr | control_dimensions_server_ |
| rclcpp::Service< moveit_msgs::srv::ChangeDriftDimensions >::SharedPtr | drift_dimensions_server_ |
| rclcpp::Service< std_srvs::srv::Empty >::SharedPtr | reset_servo_status_ |
| std::thread | thread_ |
| bool | stop_requested_ |
| std::atomic< bool > | done_stopping_ |
| StatusCode | status_ = StatusCode::NO_WARNING |
| std::atomic< bool > | paused_ |
| bool | twist_command_is_stale_ = false |
| bool | joint_command_is_stale_ = false |
| bool | ok_to_publish_ = false |
| double | collision_velocity_scale_ = 1.0 |
| Eigen::ArrayXd | delta_theta_ |
| const int | gazebo_redundant_message_count_ = 30 |
| unsigned int | num_joints_ |
| std::array< bool, 6 > | drift_dimensions_ = { { false, false, false, false, false, false } } |
| std::array< bool, 6 > | control_dimensions_ = { { true, true, true, true, true, true } } |
| std::mutex | main_loop_mutex_ |
| Eigen::Isometry3d | tf_moveit_to_robot_cmd_frame_ |
| Eigen::Isometry3d | tf_moveit_to_ee_frame_ |
| geometry_msgs::msg::TwistStamped::ConstSharedPtr | latest_twist_stamped_ |
| control_msgs::msg::JointJog::ConstSharedPtr | latest_joint_cmd_ |
| rclcpp::Time | latest_twist_command_stamp_ = rclcpp::Time(0., RCL_ROS_TIME) |
| rclcpp::Time | latest_joint_command_stamp_ = rclcpp::Time(0., RCL_ROS_TIME) |
| bool | latest_twist_cmd_is_nonzero_ = false |
| bool | latest_joint_cmd_is_nonzero_ = false |
| std::condition_variable | input_cv_ |
| bool | new_input_cmd_ = false |
| std::string | robot_link_command_frame_ |
| pluginlib::ClassLoader< online_signal_smoothing::SmoothingBaseClass > | smoothing_loader_ |
| kinematics::KinematicsBaseConstPtr | ik_solver_ |
| Eigen::Isometry3d | ik_base_to_tip_frame_ |
| bool | use_inv_jacobian_ = false |
Detailed Description
Definition at line 79 of file servo_calcs.h.
Constructor & Destructor Documentation
◆ ServoCalcs()
| moveit_servo::ServoCalcs::ServoCalcs | ( | const rclcpp::Node::SharedPtr & | node, |
| const std::shared_ptr< const moveit_servo::ServoParameters > & | parameters, | ||
| const planning_scene_monitor::PlanningSceneMonitorPtr & | planning_scene_monitor | ||
| ) |
Definition at line 65 of file servo_calcs.cpp.
◆ ~ServoCalcs()
| moveit_servo::ServoCalcs::~ServoCalcs | ( | ) |

Member Function Documentation
◆ applyJointUpdate()
|
protected |
Joint-wise update of a sensor_msgs::msg::JointState with given delta's Also filters and calculates the previous velocity.
- Parameters
-
delta_theta Eigen vector of joint delta's joint_state The joint state msg being updated previous_vel Eigen vector of previous velocities being updated
- Returns
- Returns false if there is a problem, true otherwise
Definition at line 737 of file servo_calcs.cpp.
◆ calculateSingleIteration()
|
protected |
Do calculations for a single iteration. Publish one outgoing command.
Definition at line 318 of file servo_calcs.cpp.

◆ cartesianServoCalcs()
|
protected |
Do servoing calculations for Cartesian twist commands.
Definition at line 520 of file servo_calcs.cpp.

◆ changeControlDimensions()
|
protected |
Start the main calculation timer.
Definition at line 1200 of file servo_calcs.cpp.
◆ changeDriftDimensions()
|
protected |
Allow drift in certain dimensions. For example, may allow the wrist to rotate freely. This can help avoid singularities.
- Parameters
-
request the service request response the service response
- Returns
- true if the adjustment was made
Definition at line 1187 of file servo_calcs.cpp.
◆ checkValidCommand() [1/2]
|
protected |
Checks a JointJog msg for valid (non-NaN) velocities
- Parameters
-
cmd the desired joint servo command
- Returns
- true if this represents a valid joint servo command, false otherwise
Definition at line 948 of file servo_calcs.cpp.

◆ checkValidCommand() [2/2]
|
protected |
Checks a TwistStamped msg for valid (non-NaN) velocities
- Parameters
-
cmd the desired twist servo command
- Returns
- true if this represents a valid servo twist command, false otherwise
Definition at line 963 of file servo_calcs.cpp.
◆ collisionVelocityScaleCB()
|
protected |
Definition at line 1182 of file servo_calcs.cpp.
◆ composeJointTrajMessage()
|
protected |
Compose the outgoing JointTrajectory message.
Definition at line 791 of file servo_calcs.cpp.
◆ enforceControlDimensions()
|
protected |
Uses control_dimensions_ to set the incoming twist command values to 0 in uncontrolled directions
- Parameters
-
command TwistStamped msg being used in the Cartesian calcs process
Definition at line 1091 of file servo_calcs.cpp.

◆ enforcePositionLimits()
|
protected |
Avoid overshooting joint limits.
- Returns
- Vector of the joints that would move farther past position margin limits
Definition at line 818 of file servo_calcs.cpp.
◆ filteredHalt()
|
protected |
Come to a halt in a smooth way. Apply a smoothing plugin, if one is configured.
Definition at line 870 of file servo_calcs.cpp.

◆ getCommandFrameTransform() [1/2]
| bool moveit_servo::ServoCalcs::getCommandFrameTransform | ( | Eigen::Isometry3d & | transform | ) |
Get the MoveIt planning link transform. The transform from the MoveIt planning frame to robot_link_command_frame
- Parameters
-
transform the transform that will be calculated
- Returns
- true if a valid transform was available
Definition at line 1108 of file servo_calcs.cpp.

◆ getCommandFrameTransform() [2/2]
| bool moveit_servo::ServoCalcs::getCommandFrameTransform | ( | geometry_msgs::msg::TransformStamped & | transform | ) |

◆ getEEFrameTransform() [1/2]
| bool moveit_servo::ServoCalcs::getEEFrameTransform | ( | Eigen::Isometry3d & | transform | ) |
Get the End Effector link transform. The transform from the MoveIt planning frame to EE link
- Parameters
-
transform the transform that will be calculated
- Returns
- true if a valid transform was available
Definition at line 1131 of file servo_calcs.cpp.

◆ getEEFrameTransform() [2/2]
| bool moveit_servo::ServoCalcs::getEEFrameTransform | ( | geometry_msgs::msg::TransformStamped & | transform | ) |

◆ insertRedundantPointsIntoTrajectory()
|
protected |
Gazebo simulations have very strict message timestamp requirements. Satisfy Gazebo by stuffing multiple messages into one.
Definition at line 770 of file servo_calcs.cpp.
◆ internalServoUpdate()
|
protected |
Handles all aspects of the servoing after the desired joint commands are established Joint and Cartesian calcs feed into here Handles limit enforcement, internal state updated, collision scaling, and publishing the commands.
- Parameters
-
delta_theta Eigen vector of joint delta's, from joint or Cartesian servo calcs joint_trajectory Output trajectory message
Definition at line 668 of file servo_calcs.cpp.

◆ jointCmdCB()
|
protected |

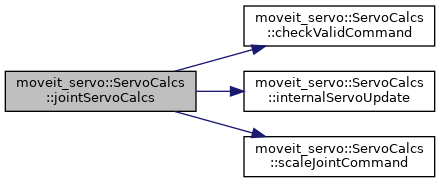
◆ jointServoCalcs()
|
protected |
Do servoing calculations for direct commands to a joint.
Definition at line 654 of file servo_calcs.cpp.

◆ jointStateCB()
|
protected |
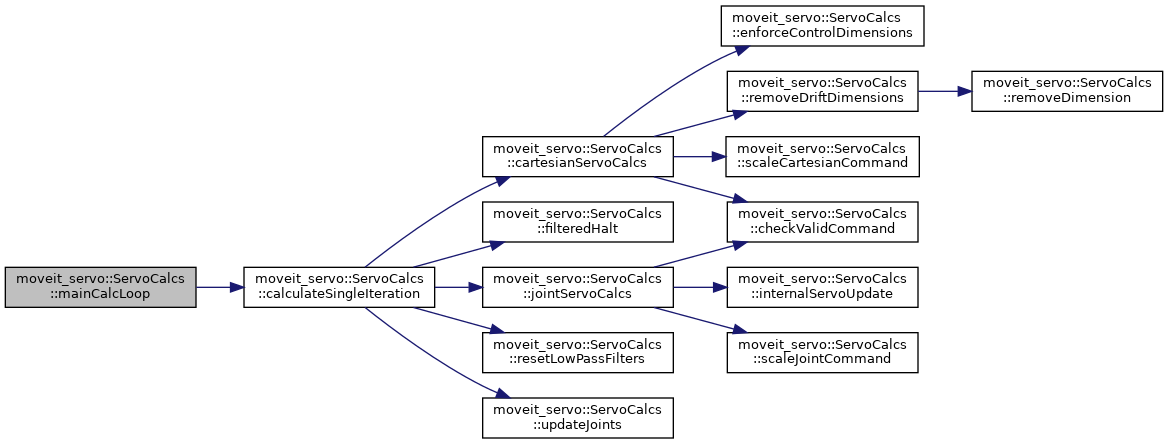
◆ mainCalcLoop()
|
protected |
Run the main calculation loop.
Definition at line 277 of file servo_calcs.cpp.

◆ removeDimension()
|
protected |
Remove the Jacobian row and the delta-x element of one Cartesian dimension, to take advantage of task redundancy
- Parameters
-
matrix The Jacobian matrix. delta_x Vector of Cartesian delta commands, should be the same size as matrix.rows() row_to_remove Dimension that will be allowed to drift, e.g. row_to_remove = 2 allows z-translation drift.
Definition at line 1060 of file servo_calcs.cpp.

◆ removeDriftDimensions()
|
protected |
Removes all of the drift dimensions from the jacobian and delta-x element
- Parameters
-
matrix The Jacobian matrix. delta_x Vector of Cartesian delta commands, should be the same size as matrix.rows()
Definition at line 1076 of file servo_calcs.cpp.


◆ resetLowPassFilters()
|
protected |
Set the filters to the specified values.
Definition at line 785 of file servo_calcs.cpp.

◆ resetServoStatus()
|
protected |
Service callback to reset Servo status, e.g. so the arm can move again after a collision.
Definition at line 1213 of file servo_calcs.cpp.
◆ robotLinkCommandFrameCallback()
|
protected |
Definition at line 509 of file servo_calcs.cpp.
◆ scaleCartesianCommand()
|
protected |
If incoming velocity commands are from a unitless joystick, scale them to physical units. Also, multiply by timestep to calculate a position change.
- Returns
- a vector of position deltas
Definition at line 991 of file servo_calcs.cpp.

◆ scaleJointCommand()
|
protected |
If incoming velocity commands are from a unitless joystick, scale them to physical units. Also, multiply by timestep to calculate a position change.
- Returns
- a vector of position deltas
Definition at line 1025 of file servo_calcs.cpp.

◆ setPaused()
| void moveit_servo::ServoCalcs::setPaused | ( | bool | paused | ) |
Pause or unpause processing servo commands while keeping the timers alive.
Definition at line 1220 of file servo_calcs.cpp.

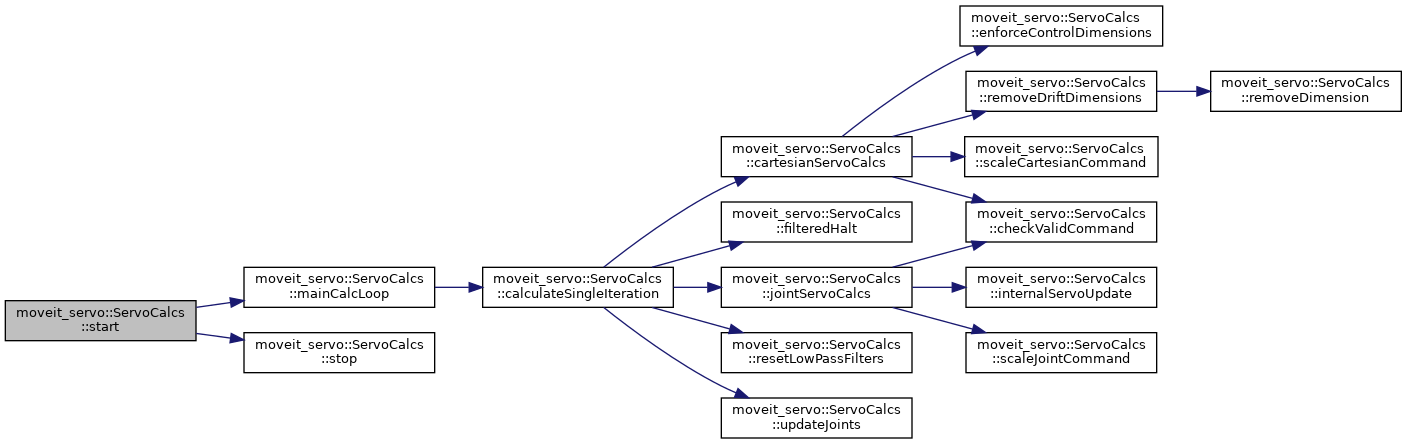
◆ start()
| void moveit_servo::ServoCalcs::start | ( | ) |
Start the timer where we do work and publish outputs.
Definition at line 210 of file servo_calcs.cpp.
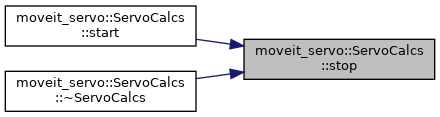
◆ stop()
|
protected |
Stop the currently running thread.
Definition at line 256 of file servo_calcs.cpp.
◆ suddenHalt()
|
protected |
Suddenly halt for a joint limit or other critical issue. Is handled differently for position vs. velocity control.
Definition at line 921 of file servo_calcs.cpp.

◆ twistStampedCB()
|
protected |

◆ updateJoints()
|
protected |
Parse the incoming joint msg for the joints of our MoveGroup.
Definition at line 937 of file servo_calcs.cpp.

Member Data Documentation
◆ collision_velocity_scale_
|
protected |
Definition at line 324 of file servo_calcs.h.
◆ collision_velocity_scale_sub_
|
protected |
Definition at line 305 of file servo_calcs.h.
◆ control_dimensions_
|
protected |
Definition at line 337 of file servo_calcs.h.
◆ control_dimensions_server_
|
protected |
Definition at line 309 of file servo_calcs.h.
◆ current_state_
|
protected |
Definition at line 287 of file servo_calcs.h.
◆ delta_theta_
|
protected |
Definition at line 327 of file servo_calcs.h.
◆ done_stopping_
|
protected |
Definition at line 316 of file servo_calcs.h.
◆ drift_dimensions_
|
protected |
Definition at line 334 of file servo_calcs.h.
◆ drift_dimensions_server_
|
protected |
Definition at line 310 of file servo_calcs.h.
◆ gazebo_redundant_message_count_
|
protected |
Definition at line 329 of file servo_calcs.h.
◆ have_nonzero_command_
|
protected |
Definition at line 279 of file servo_calcs.h.
◆ have_nonzero_joint_command_
|
protected |
Definition at line 278 of file servo_calcs.h.
◆ have_nonzero_twist_stamped_
|
protected |
Definition at line 277 of file servo_calcs.h.
◆ ik_base_to_tip_frame_
|
protected |
Definition at line 362 of file servo_calcs.h.
◆ ik_solver_
|
protected |
Definition at line 361 of file servo_calcs.h.
◆ input_cv_
|
protected |
Definition at line 351 of file servo_calcs.h.
◆ internal_joint_state_
|
protected |
Definition at line 293 of file servo_calcs.h.
◆ joint_cmd_sub_
|
protected |
Definition at line 304 of file servo_calcs.h.
◆ joint_command_is_stale_
|
protected |
Definition at line 322 of file servo_calcs.h.
◆ joint_model_group_
|
protected |
Definition at line 285 of file servo_calcs.h.
◆ joint_servo_cmd_
|
protected |
Definition at line 283 of file servo_calcs.h.
◆ joint_state_name_map_
|
protected |
Definition at line 294 of file servo_calcs.h.
◆ joint_state_sub_
|
protected |
Definition at line 302 of file servo_calcs.h.
◆ last_sent_command_
|
protected |
Definition at line 299 of file servo_calcs.h.
◆ latest_joint_cmd_
|
protected |
Definition at line 344 of file servo_calcs.h.
◆ latest_joint_cmd_is_nonzero_
|
protected |
Definition at line 348 of file servo_calcs.h.
◆ latest_joint_command_stamp_
|
protected |
Definition at line 346 of file servo_calcs.h.
◆ latest_twist_cmd_is_nonzero_
|
protected |
Definition at line 347 of file servo_calcs.h.
◆ latest_twist_command_stamp_
|
protected |
Definition at line 345 of file servo_calcs.h.
◆ latest_twist_stamped_
|
protected |
Definition at line 343 of file servo_calcs.h.
◆ main_loop_mutex_
|
mutableprotected |
Definition at line 340 of file servo_calcs.h.
◆ multiarray_outgoing_cmd_pub_
|
protected |
Definition at line 308 of file servo_calcs.h.
◆ new_input_cmd_
|
protected |
Definition at line 352 of file servo_calcs.h.
◆ node_
|
protected |
Definition at line 258 of file servo_calcs.h.
◆ num_joints_
|
protected |
Definition at line 331 of file servo_calcs.h.
◆ ok_to_publish_
|
protected |
Definition at line 323 of file servo_calcs.h.
◆ original_joint_state_
|
protected |
Definition at line 293 of file servo_calcs.h.
◆ parameters_
|
protected |
Definition at line 261 of file servo_calcs.h.
◆ paused_
|
protected |
Definition at line 320 of file servo_calcs.h.
◆ planning_scene_monitor_
|
protected |
Definition at line 264 of file servo_calcs.h.
◆ reset_servo_status_
|
protected |
Definition at line 311 of file servo_calcs.h.
◆ robot_link_command_frame_
|
protected |
Definition at line 355 of file servo_calcs.h.
◆ smoother_
|
protected |
Definition at line 297 of file servo_calcs.h.
◆ smoothing_loader_
|
protected |
Definition at line 359 of file servo_calcs.h.
◆ status_
|
protected |
Definition at line 319 of file servo_calcs.h.
◆ status_pub_
|
protected |
Definition at line 306 of file servo_calcs.h.
◆ stop_requested_
|
protected |
Definition at line 315 of file servo_calcs.h.
◆ tf_moveit_to_ee_frame_
|
protected |
Definition at line 342 of file servo_calcs.h.
◆ tf_moveit_to_robot_cmd_frame_
|
protected |
Definition at line 341 of file servo_calcs.h.
◆ thread_
|
protected |
Definition at line 314 of file servo_calcs.h.
◆ trajectory_outgoing_cmd_pub_
|
protected |
Definition at line 307 of file servo_calcs.h.
◆ twist_command_is_stale_
|
protected |
Definition at line 321 of file servo_calcs.h.
◆ twist_stamped_cmd_
|
protected |
Definition at line 282 of file servo_calcs.h.
◆ twist_stamped_sub_
|
protected |
Definition at line 303 of file servo_calcs.h.
◆ updated_filters_
|
protected |
Definition at line 274 of file servo_calcs.h.
◆ use_inv_jacobian_
|
protected |
Definition at line 363 of file servo_calcs.h.
◆ wait_for_servo_commands_
|
protected |
Definition at line 271 of file servo_calcs.h.
◆ zero_velocity_count_
|
protected |
Definition at line 268 of file servo_calcs.h.
The documentation for this class was generated from the following files:
- moveit_ros/moveit_servo/include/moveit_servo/servo_calcs.h
- moveit_ros/moveit_servo/src/servo_calcs.cpp