#include <simulation.hpp>
Public Member Functions | |
| std::string | getName () const override |
| Returns the name of the setup step. More... | |
| void | onInit () override |
| Overridable initialization method. More... | |
| bool | isReady () const override |
| Return true if the data necessary to proceed with this step has been configured. More... | |
| std::filesystem::path | getURDFPath () const |
| std::string | getURDFPackageName () const |
| std::string | getURDFContents () const |
| std::string | getJointHardwareInterface (const std::string &joint_name) |
| Helper function to get the controller that is controlling the joint. More... | |
| std::string | getGazeboCompatibleURDF () |
| Parses the existing urdf and constructs a string from it with the elements required by gazebo simulator added. More... | |
| bool | outputGazeboURDFFile (const std::filesystem::path &file_path) |
| bool | isValidXML (const std::string &new_urdf_contents, int &error_row, std::string &error_description) const |
| Check if the given xml is valid. More... | |
 Public Member Functions inherited from moveit_setup::SetupStep Public Member Functions inherited from moveit_setup::SetupStep | |
| SetupStep ()=default | |
| SetupStep (const SetupStep &)=default | |
| SetupStep (SetupStep &&)=default | |
| SetupStep & | operator= (const SetupStep &)=default |
| SetupStep & | operator= (SetupStep &&)=default |
| virtual | ~SetupStep ()=default |
| void | initialize (const rclcpp::Node::SharedPtr &parent_node, const DataWarehousePtr &config_data) |
| Called after construction to initialize the step. More... | |
| const rclcpp::Logger & | getLogger () const |
| Makes a namespaced logger for this step available to the widget. More... | |
Protected Attributes | |
| std::shared_ptr< URDFConfig > | urdf_config_ |
| std::string | gazebo_urdf_string_ |
| Gazebo URDF robot model string. More... | |
| bool | save_gazebo_urdf_ |
| Whether a new Gazebo URDF is created. More... | |
| Protected Attributes inherited from moveit_setup::SetupStep | |
| DataWarehousePtr | config_data_ |
| rclcpp::Node::SharedPtr | parent_node_ |
| std::shared_ptr< rclcpp::Logger > | logger_ |
Detailed Description
Definition at line 45 of file simulation.hpp.
Member Function Documentation
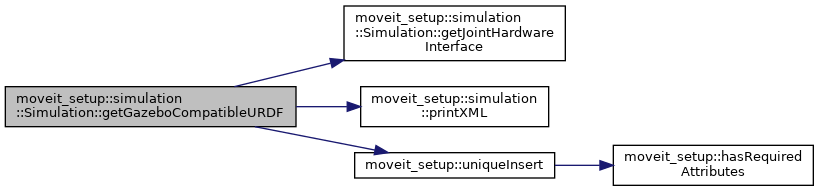
◆ getGazeboCompatibleURDF()
| std::string moveit_setup::simulation::Simulation::getGazeboCompatibleURDF | ( | ) |
Parses the existing urdf and constructs a string from it with the elements required by gazebo simulator added.
- Returns
- gazebo compatible urdf or empty if error encountered
Definition at line 85 of file simulation.cpp.

◆ getJointHardwareInterface()
| std::string moveit_setup::simulation::Simulation::getJointHardwareInterface | ( | const std::string & | joint_name | ) |
Helper function to get the controller that is controlling the joint.
- Returns
- controller type
TODO: Need to port this - may require depending on moveit_setup_controllers ControllerConfig
for (ControllerConfig& ros_control_config : controller_configs_) { std::vector<std::string>::iterator joint_it = std::find(ros_control_config.joints_.begin(), ros_control_config.joints_.end(), joint_name); if (joint_it != ros_control_config.joints_.end()) { if (ros_control_config.type_.substr(0, 8) == "position") return "hardware_interface/PositionJointInterface"; else if (ros_control_config.type_.substr(0, 8) == "velocity") return "hardware_interface/VelocityJointInterface"; As of writing this, available joint command interfaces are position, velocity and effort. else return "hardware_interface/EffortJointInterface"; } }
Definition at line 51 of file simulation.cpp.

◆ getName()
|
inlineoverridevirtual |
Returns the name of the setup step.
Implements moveit_setup::SetupStep.
Definition at line 48 of file simulation.hpp.
◆ getURDFContents()
|
inline |
Definition at line 70 of file simulation.hpp.
◆ getURDFPackageName()
|
inline |
Definition at line 65 of file simulation.hpp.
◆ getURDFPath()
|
inline |

◆ isReady()
|
inlineoverridevirtual |
Return true if the data necessary to proceed with this step has been configured.
Reimplemented from moveit_setup::SetupStep.
Definition at line 55 of file simulation.hpp.
◆ isValidXML()
| bool moveit_setup::simulation::Simulation::isValidXML | ( | const std::string & | new_urdf_contents, |
| int & | error_row, | ||
| std::string & | error_description | ||
| ) | const |
Check if the given xml is valid.
- Parameters
-
[in] new_urdf_contents The string of xml to check [out] error_row The row of the error [out] error_description The description
- Returns
- True if valid, false otherwise
Definition at line 188 of file simulation.cpp.

◆ onInit()
|
overridevirtual |
Overridable initialization method.
Reimplemented from moveit_setup::SetupStep.
Definition at line 43 of file simulation.cpp.
◆ outputGazeboURDFFile()
| bool moveit_setup::simulation::Simulation::outputGazeboURDFFile | ( | const std::filesystem::path & | file_path | ) |
Definition at line 173 of file simulation.cpp.
Member Data Documentation
◆ gazebo_urdf_string_
|
protected |
Gazebo URDF robot model string.
Definition at line 104 of file simulation.hpp.
◆ save_gazebo_urdf_
|
protected |
Whether a new Gazebo URDF is created.
Definition at line 107 of file simulation.hpp.
◆ urdf_config_
|
protected |
Definition at line 100 of file simulation.hpp.
The documentation for this class was generated from the following files:
- moveit_setup_assistant/moveit_setup_simulation/include/moveit_setup_simulation/simulation.hpp
- moveit_setup_assistant/moveit_setup_simulation/src/simulation.cpp