Robot independent test class setup. More...
#include <load_test_robot.h>
Protected Member Functions | |
| LoadTestRobot (const std::string &robot_name, const std::string &group_name) | |
| Eigen::VectorXd | getRandomState () const |
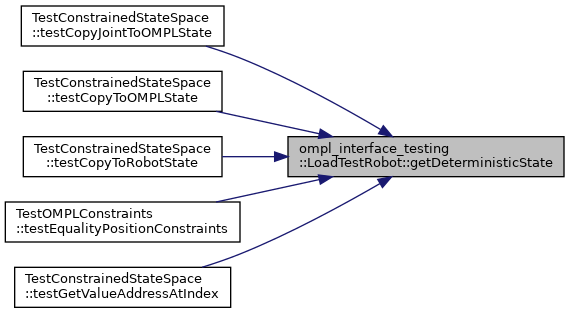
| Eigen::VectorXd | getDeterministicState () const |
| Create a joint position vector with values 0.1, 0.2, 0.3, ... where the length depends on the number of joints in the robot. More... | |
Protected Attributes | |
| std::string | group_name_ |
| std::string | robot_name_ |
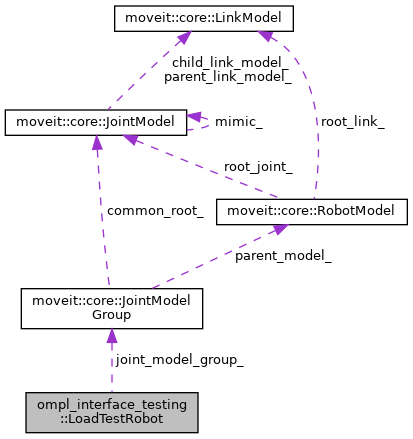
| moveit::core::RobotModelPtr | robot_model_ |
| moveit::core::RobotStatePtr | robot_state_ |
| const moveit::core::JointModelGroup * | joint_model_group_ |
| std::size_t | num_dofs_ |
| std::string | base_link_name_ |
| std::string | ee_link_name_ |
Detailed Description
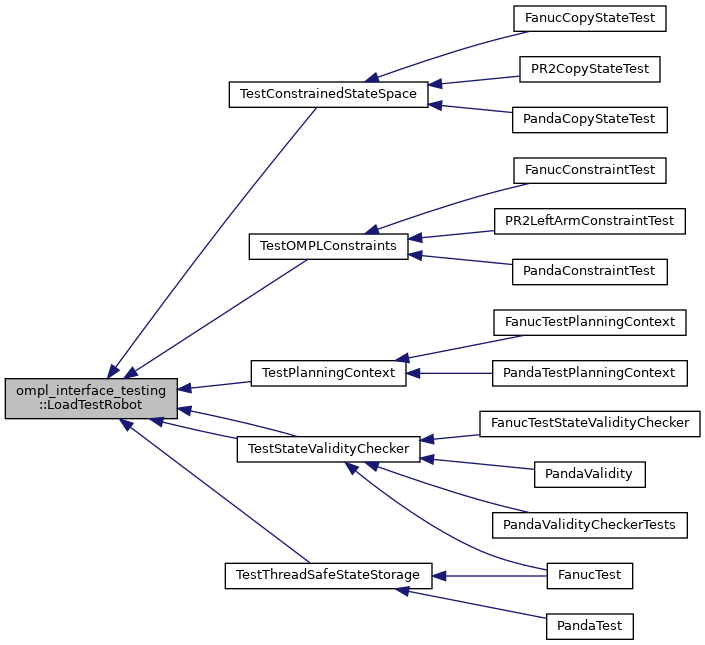
Robot independent test class setup.
The desired robot tests can be impelmented in a derived class in a generic way.
It is implemented this way to avoid the ros specific test framework outside moveit_ros.
(This is an (uglier) alternative to using the rostest framework and reading the robot settings from the parameter server. Then we have several rostest launch files that load the parameters for a specific robot and run the same compiled tests for all robots.)
based on https://stackoverflow.com/questions/38207346/specify-constructor-arguments-for-a-google-test-fixture/38218657 (answer by PiotrNycz)
— example.cpp —
#include <gtest/gtest.h> #include "load_test_robot.h"
class GenericTests : public ompl_interface_testing::LoadTestRobot, public testing::Test { public: GenericTests(const std::string& robot_name, const std::string& group_name) : LoadTestRobot(robot_name, group_name) { } void SetUp() override { } void TearDown() override { }
void someTest() { // use robot_model_, robot_state_, .. here EXPECT_TRUE(true); } };
// now you can run someTest() on different robots:
class PandaTest : public GenericTests { protected: PandaTest() : GenericTests("panda", "panda_arm") { } };
TEST_F(PandaTest, someTest) { someTest(); }
— end example.cpp —
Definition at line 98 of file load_test_robot.h.
Constructor & Destructor Documentation
◆ LoadTestRobot()
|
inlineprotected |

Member Function Documentation
◆ getDeterministicState()
|
inlineprotected |
Create a joint position vector with values 0.1, 0.2, 0.3, ... where the length depends on the number of joints in the robot.
Definition at line 129 of file load_test_robot.h.
◆ getRandomState()
|
inlineprotected |
Definition at line 118 of file load_test_robot.h.
Member Data Documentation
◆ base_link_name_
|
protected |
Definition at line 150 of file load_test_robot.h.
◆ ee_link_name_
|
protected |
Definition at line 151 of file load_test_robot.h.
◆ group_name_
|
protected |
Definition at line 142 of file load_test_robot.h.
◆ joint_model_group_
|
protected |
Definition at line 147 of file load_test_robot.h.
◆ num_dofs_
|
protected |
Definition at line 149 of file load_test_robot.h.
◆ robot_model_
|
protected |
Definition at line 145 of file load_test_robot.h.
◆ robot_name_
|
protected |
Definition at line 143 of file load_test_robot.h.
◆ robot_state_
|
protected |
Definition at line 146 of file load_test_robot.h.
The documentation for this class was generated from the following file:
- moveit_planners/ompl/ompl_interface/test/load_test_robot.h