Set of cartesian limits, has values for velocity, acceleration and deceleration of both the translational and rotational part. More...
#include <cartesian_limit.h>
Public Member Functions | |
| CartesianLimit () | |
| bool | hasMaxTranslationalVelocity () const |
| Check if translational velocity limit is set. More... | |
| void | setMaxTranslationalVelocity (double max_trans_vel) |
| Set the maximal translational velocity. More... | |
| double | getMaxTranslationalVelocity () const |
| Return the maximal translational velocity [m/s], 0 if nothing was set. More... | |
| bool | hasMaxTranslationalAcceleration () const |
| Check if translational acceleration limit is set. More... | |
| void | setMaxTranslationalAcceleration (double max_trans_acc) |
| Set the maximum translational acceleration. More... | |
| double | getMaxTranslationalAcceleration () const |
| Return the maximal translational acceleration [m/s^2], 0 if nothing was set. More... | |
| bool | hasMaxTranslationalDeceleration () const |
| Check if translational deceleration limit is set. More... | |
| void | setMaxTranslationalDeceleration (double max_trans_dec) |
| Set the maximum translational deceleration. More... | |
| double | getMaxTranslationalDeceleration () const |
| Return the maximal translational deceleration [m/s^2], 0 if nothing was set. More... | |
| bool | hasMaxRotationalVelocity () const |
| Check if rotational velocity limit is set. More... | |
| void | setMaxRotationalVelocity (double max_rot_vel) |
| Set the maximum rotational velocity. More... | |
| double | getMaxRotationalVelocity () const |
| Return the maximal rotational velocity [rad/s], 0 if nothing was set. More... | |
Detailed Description
Set of cartesian limits, has values for velocity, acceleration and deceleration of both the translational and rotational part.
Definition at line 44 of file cartesian_limit.h.
Constructor & Destructor Documentation
◆ CartesianLimit()
| pilz_industrial_motion_planner::CartesianLimit::CartesianLimit | ( | ) |
Definition at line 37 of file cartesian_limit.cpp.
Member Function Documentation
◆ getMaxRotationalVelocity()
| double pilz_industrial_motion_planner::CartesianLimit::getMaxRotationalVelocity | ( | ) | const |
Return the maximal rotational velocity [rad/s], 0 if nothing was set.
- Returns
- maximal rotational velocity, 0 if nothing was set
Definition at line 116 of file cartesian_limit.cpp.

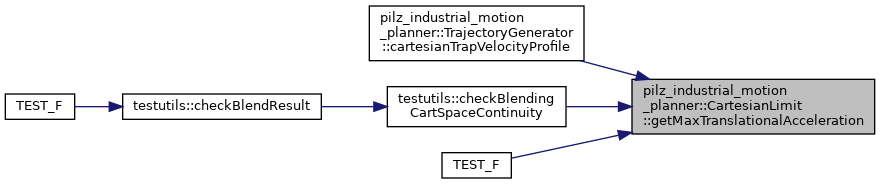
◆ getMaxTranslationalAcceleration()
| double pilz_industrial_motion_planner::CartesianLimit::getMaxTranslationalAcceleration | ( | ) | const |
Return the maximal translational acceleration [m/s^2], 0 if nothing was set.
- Returns
- maximal translational acceleration, 0 if nothing was set
Definition at line 80 of file cartesian_limit.cpp.
◆ getMaxTranslationalDeceleration()
| double pilz_industrial_motion_planner::CartesianLimit::getMaxTranslationalDeceleration | ( | ) | const |
Return the maximal translational deceleration [m/s^2], 0 if nothing was set.
- Returns
- maximal translational deceleration, 0 if nothing was set, always <=0 [m/s^2]
Definition at line 98 of file cartesian_limit.cpp.

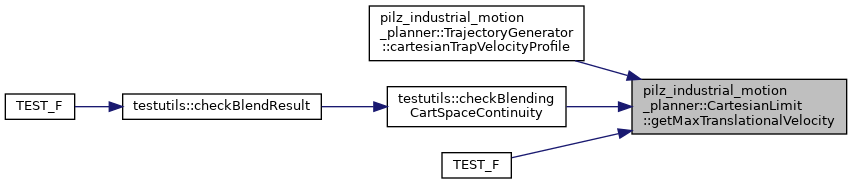
◆ getMaxTranslationalVelocity()
| double pilz_industrial_motion_planner::CartesianLimit::getMaxTranslationalVelocity | ( | ) | const |
Return the maximal translational velocity [m/s], 0 if nothing was set.
- Returns
- Maximum translational velocity, 0 if nothing was set
Definition at line 62 of file cartesian_limit.cpp.
◆ hasMaxRotationalVelocity()
| bool pilz_industrial_motion_planner::CartesianLimit::hasMaxRotationalVelocity | ( | ) | const |
Check if rotational velocity limit is set.
- Returns
- True if limit was set false otherwise
Definition at line 105 of file cartesian_limit.cpp.
◆ hasMaxTranslationalAcceleration()
| bool pilz_industrial_motion_planner::CartesianLimit::hasMaxTranslationalAcceleration | ( | ) | const |
Check if translational acceleration limit is set.
- Returns
- True if limit was set false otherwise
Definition at line 69 of file cartesian_limit.cpp.

◆ hasMaxTranslationalDeceleration()
| bool pilz_industrial_motion_planner::CartesianLimit::hasMaxTranslationalDeceleration | ( | ) | const |
Check if translational deceleration limit is set.
- Returns
- True if limit was set false otherwise
Definition at line 87 of file cartesian_limit.cpp.

◆ hasMaxTranslationalVelocity()
| bool pilz_industrial_motion_planner::CartesianLimit::hasMaxTranslationalVelocity | ( | ) | const |
Check if translational velocity limit is set.
- Returns
- True if limit was set, false otherwise
Definition at line 51 of file cartesian_limit.cpp.

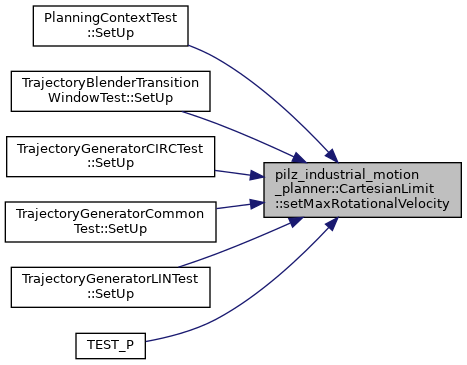
◆ setMaxRotationalVelocity()
| void pilz_industrial_motion_planner::CartesianLimit::setMaxRotationalVelocity | ( | double | max_rot_vel | ) |
Set the maximum rotational velocity.
- Parameters
-
Maximum rotational velocity [rad/s]
Definition at line 110 of file cartesian_limit.cpp.
◆ setMaxTranslationalAcceleration()
| void pilz_industrial_motion_planner::CartesianLimit::setMaxTranslationalAcceleration | ( | double | max_trans_acc | ) |
Set the maximum translational acceleration.
- Parameters
-
Maximum translational acceleration [m/s^2]
Definition at line 74 of file cartesian_limit.cpp.

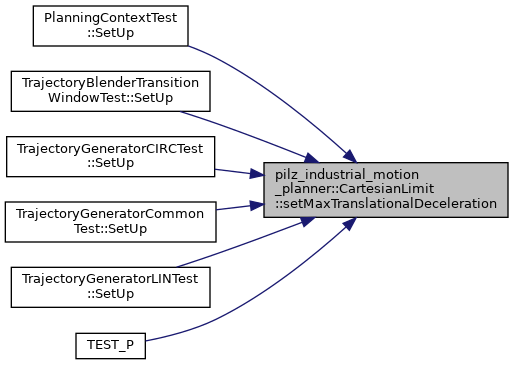
◆ setMaxTranslationalDeceleration()
| void pilz_industrial_motion_planner::CartesianLimit::setMaxTranslationalDeceleration | ( | double | max_trans_dec | ) |
Set the maximum translational deceleration.
- Parameters
-
Maximum translational deceleration, always <=0 [m/s^2]
Definition at line 92 of file cartesian_limit.cpp.
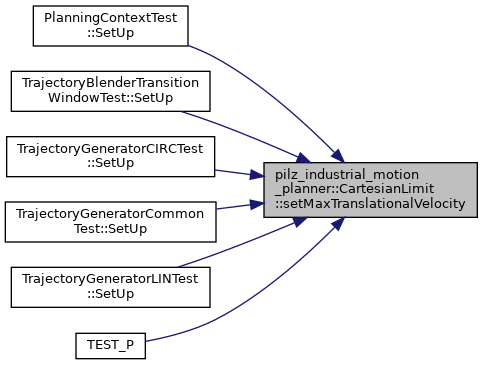
◆ setMaxTranslationalVelocity()
| void pilz_industrial_motion_planner::CartesianLimit::setMaxTranslationalVelocity | ( | double | max_trans_vel | ) |
Set the maximal translational velocity.
- Parameters
-
Maximum translational velocity [m/s]
Definition at line 56 of file cartesian_limit.cpp.
The documentation for this class was generated from the following files:
- moveit_planners/pilz_industrial_motion_planner/include/pilz_industrial_motion_planner/cartesian_limit.h
- moveit_planners/pilz_industrial_motion_planner/src/cartesian_limit.cpp