#include <time_optimal_trajectory_generation.h>
Inheritance diagram for trajectory_processing::TimeOptimalTrajectoryGeneration:
Collaboration diagram for trajectory_processing::TimeOptimalTrajectoryGeneration:
Public Member Functions | |
| TimeOptimalTrajectoryGeneration (const double path_tolerance=0.1, const double resample_dt=0.1, const double min_angle_change=0.001) | |
| bool | computeTimeStamps (robot_trajectory::RobotTrajectory &trajectory, const double max_velocity_scaling_factor=1.0, const double max_acceleration_scaling_factor=1.0) const override |
| bool | computeTimeStamps (robot_trajectory::RobotTrajectory &trajectory, const std::unordered_map< std::string, double > &velocity_limits, const std::unordered_map< std::string, double > &acceleration_limits) const override |
 Public Member Functions inherited from trajectory_processing::TimeParameterization Public Member Functions inherited from trajectory_processing::TimeParameterization | |
| TimeParameterization ()=default | |
| TimeParameterization (const TimeParameterization &)=default | |
| TimeParameterization (TimeParameterization &&)=default | |
| TimeParameterization & | operator= (const TimeParameterization &)=default |
| TimeParameterization & | operator= (TimeParameterization &&)=default |
| virtual | ~TimeParameterization ()=default |
Detailed Description
Definition at line 164 of file time_optimal_trajectory_generation.h.
Constructor & Destructor Documentation
◆ TimeOptimalTrajectoryGeneration()
| trajectory_processing::TimeOptimalTrajectoryGeneration::TimeOptimalTrajectoryGeneration | ( | const double | path_tolerance = 0.1, |
| const double | resample_dt = 0.1, |
||
| const double | min_angle_change = 0.001 |
||
| ) |
Definition at line 878 of file time_optimal_trajectory_generation.cpp.
Member Function Documentation
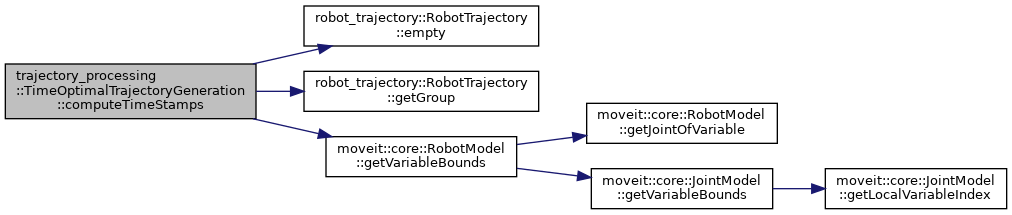
◆ computeTimeStamps() [1/2]
|
overridevirtual |
Implements trajectory_processing::TimeParameterization.
Definition at line 884 of file time_optimal_trajectory_generation.cpp.
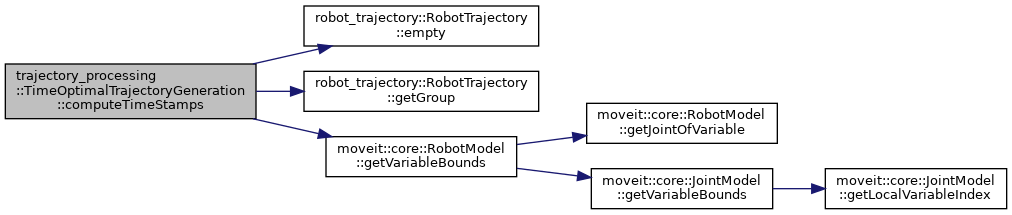
Here is the call graph for this function:
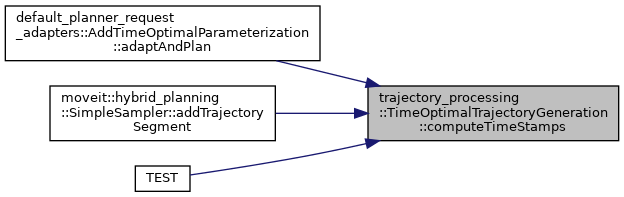
Here is the caller graph for this function:
◆ computeTimeStamps() [2/2]
|
overridevirtual |
Implements trajectory_processing::TimeParameterization.
Definition at line 986 of file time_optimal_trajectory_generation.cpp.
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- moveit_core/trajectory_processing/include/moveit/trajectory_processing/time_optimal_trajectory_generation.h
- moveit_core/trajectory_processing/src/time_optimal_trajectory_generation.cpp