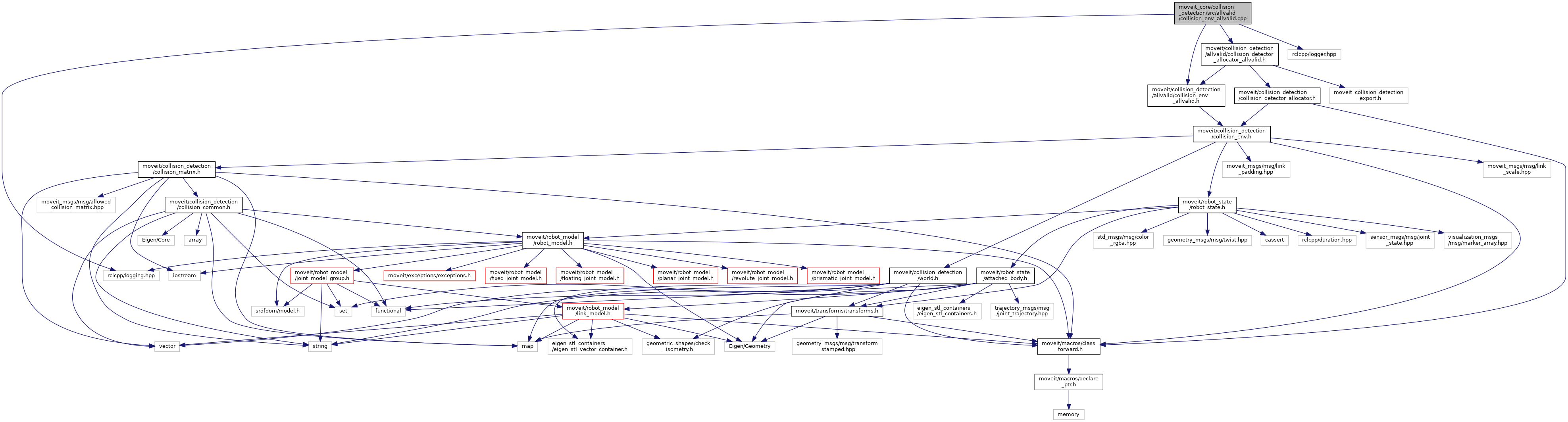
#include <moveit/collision_detection/allvalid/collision_env_allvalid.h>#include <moveit/collision_detection/allvalid/collision_detector_allocator_allvalid.h>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>
Include dependency graph for collision_env_allvalid.cpp: