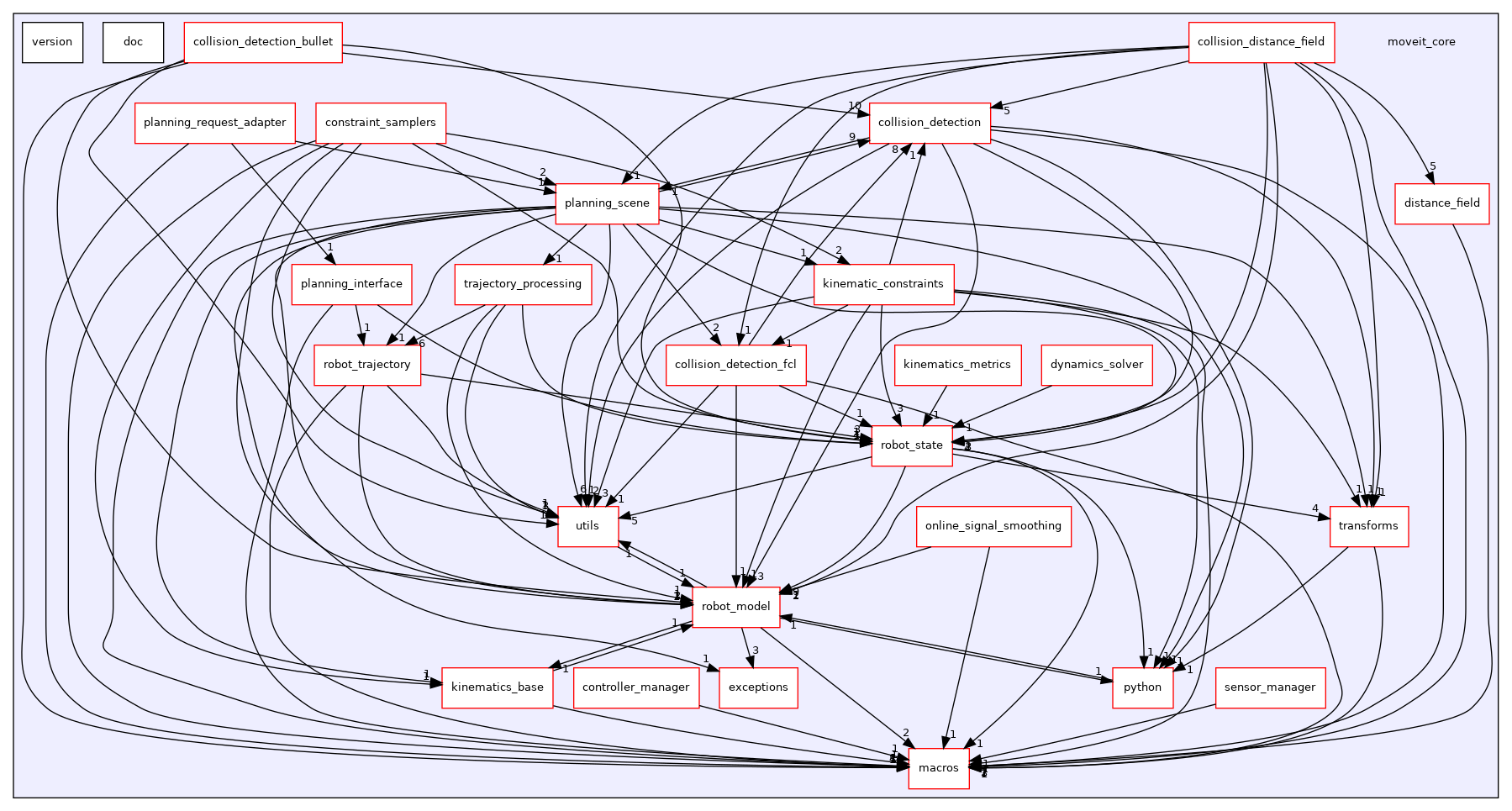
Directory dependency graph for moveit_core:
Directories | |
| directory | collision_detection |
| directory | collision_detection_bullet |
| directory | collision_detection_fcl |
| directory | collision_distance_field |
| directory | constraint_samplers |
| directory | controller_manager |
| directory | distance_field |
| directory | doc |
| directory | dynamics_solver |
| directory | exceptions |
| directory | kinematic_constraints |
| directory | kinematics_base |
| directory | kinematics_metrics |
| directory | macros |
| directory | online_signal_smoothing |
| directory | planning_interface |
| directory | planning_request_adapter |
| directory | planning_scene |
| directory | python |
| directory | robot_model |
| directory | robot_state |
| directory | robot_trajectory |
| directory | sensor_manager |
| directory | trajectory_processing |
| directory | transforms |
| directory | utils |
| directory | version |
Files | |
| file | setup.py [code] |