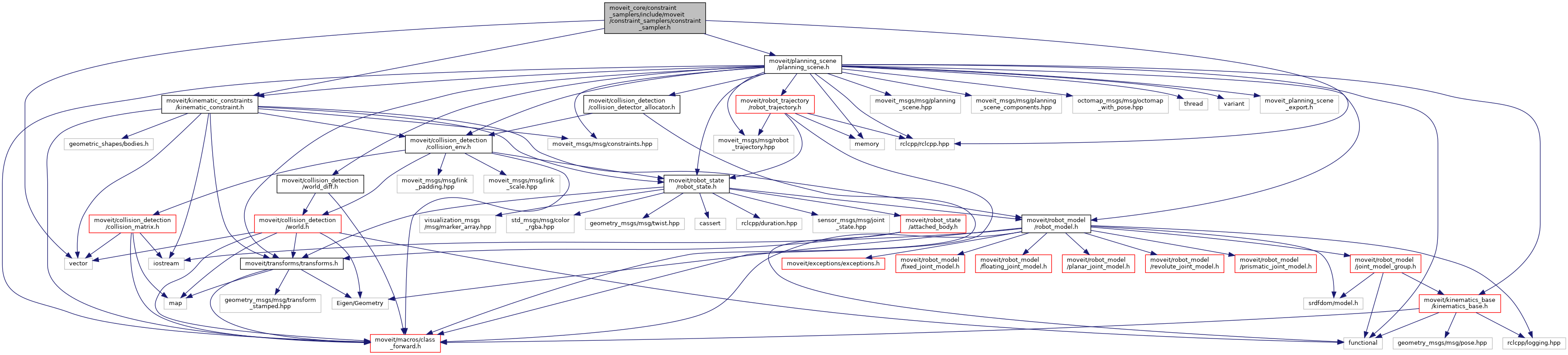
#include <moveit/planning_scene/planning_scene.h>#include <moveit/kinematic_constraints/kinematic_constraint.h>#include <vector>#include <rclcpp/rclcpp.hpp>
Include dependency graph for constraint_sampler.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | constraint_samplers::ConstraintSampler |
| ConstraintSampler is an abstract base class that allows the sampling of a kinematic state for a particular group of a robot. More... | |
Namespaces | |
| constraint_samplers | |
| The constraint samplers namespace contains a number of methods for generating samples based on a constraint or set of constraints. | |
Functions | |
| constraint_samplers::MOVEIT_CLASS_FORWARD (ConstraintSampler) | |