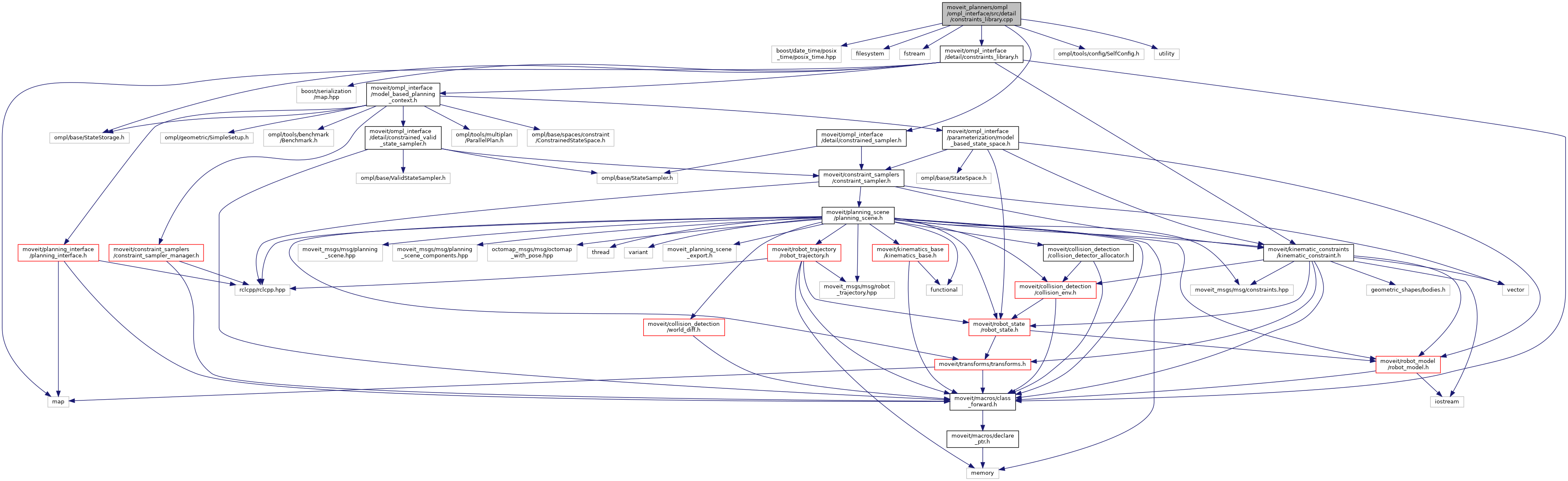
#include <boost/date_time/posix_time/posix_time.hpp>#include <filesystem>#include <fstream>#include <moveit/ompl_interface/detail/constrained_sampler.h>#include <moveit/ompl_interface/detail/constraints_library.h>#include <ompl/tools/config/SelfConfig.h>#include <utility>
Include dependency graph for constraints_library.cpp:
Go to the source code of this file.
Classes | |
| class | ompl_interface::ConstraintApproximationStateSampler |
Namespaces | |
| ompl_interface | |
| The MoveIt interface to OMPL. | |
Functions | |
| bool | ompl_interface::interpolateUsingStoredStates (const ConstraintApproximationStateStorage *state_storage, const ob::State *from, const ob::State *to, const double t, ob::State *state) |
| ompl::base::StateSamplerPtr | ompl_interface::allocConstraintApproximationStateSampler (const ob::StateSpace *space, const std::vector< int > &expected_signature, const ConstraintApproximationStateStorage *state_storage, std::size_t milestones) |