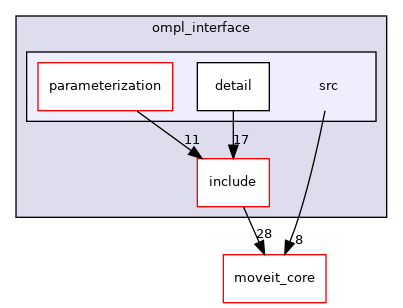
Directory dependency graph for src:
Directories | |
| directory | detail |
| directory | parameterization |
Files | |
| file | model_based_planning_context.cpp [code] |
| file | ompl_interface.cpp [code] |
| file | ompl_planner_manager.cpp [code] |
| file | planning_context_manager.cpp [code] |