moveit2
The MoveIt Motion Planning Framework for ROS 2.
moveit_ros
hybrid_planning
local_planner
trajectory_operator_plugins
include
moveit
trajectory_operator_plugins
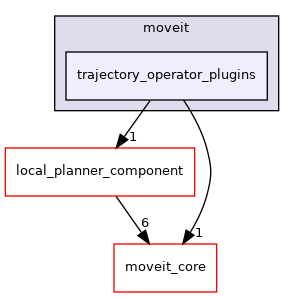
trajectory_operator_plugins Directory Reference
Directory dependency graph for trajectory_operator_plugins:
Files
file
simple_sampler.h
[code]
Generated by
1.9.1