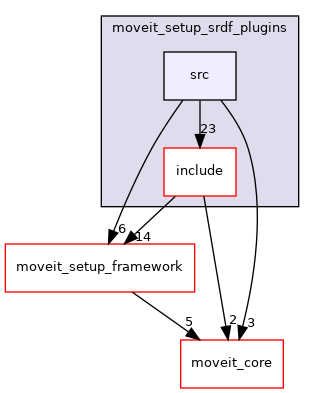
Directory dependency graph for src:
Files | |
| file | collision_linear_model.cpp [code] |
| file | collision_matrix_model.cpp [code] |
| file | compute_default_collisions.cpp [code] |
| file | default_collisions.cpp [code] |
| file | default_collisions_widget.cpp [code] |
| file | end_effectors.cpp [code] |
| file | end_effectors_widget.cpp [code] |
| file | group_edit_widget.cpp [code] |
| file | group_meta_config.cpp [code] |
| file | kinematic_chain_widget.cpp [code] |
| file | passive_joints.cpp [code] |
| file | passive_joints_widget.cpp [code] |
| file | planning_groups.cpp [code] |
| file | planning_groups_widget.cpp [code] |
| file | robot_poses.cpp [code] |
| file | robot_poses_widget.cpp [code] |
| file | rotated_header_view.cpp [code] |
| file | virtual_joints.cpp [code] |
| file | virtual_joints_widget.cpp [code] |