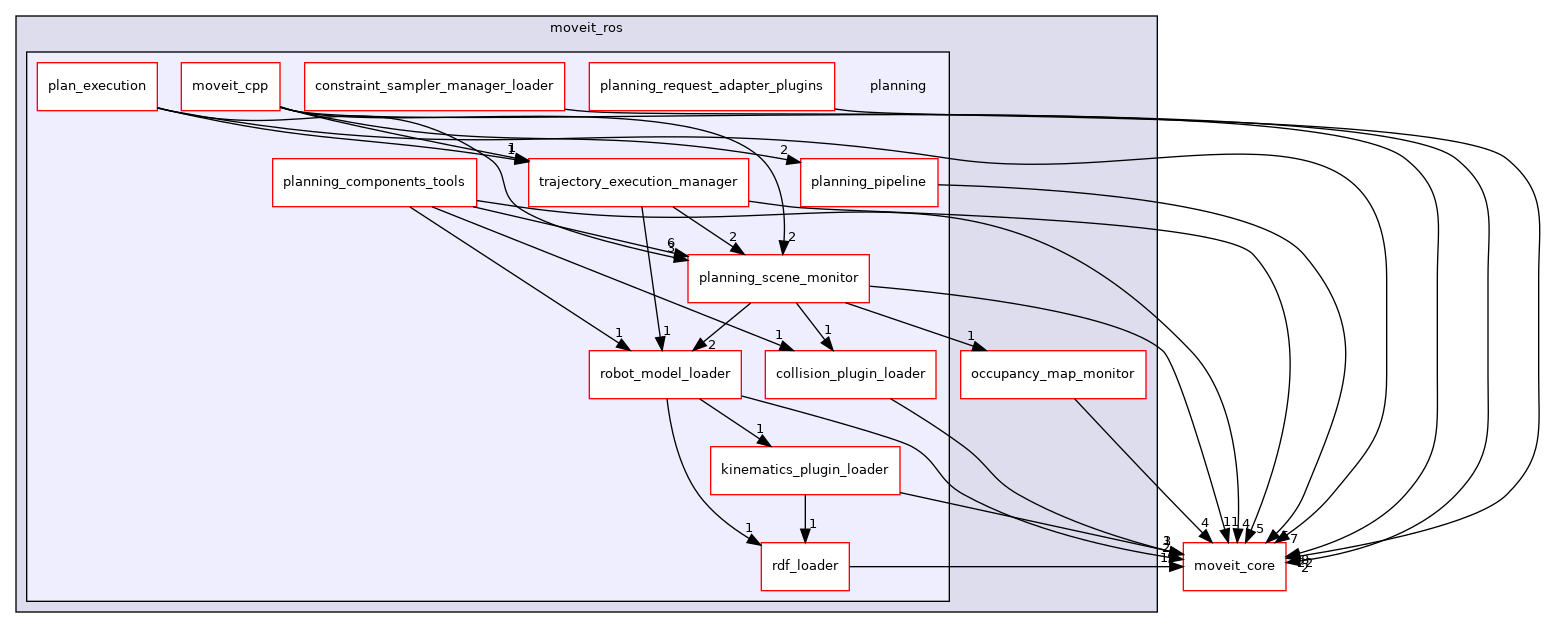
Directory dependency graph for planning:
Directories | |
| directory | collision_plugin_loader |
| directory | constraint_sampler_manager_loader |
| directory | kinematics_plugin_loader |
| directory | moveit_cpp |
| directory | plan_execution |
| directory | planning_components_tools |
| directory | planning_pipeline |
| directory | planning_request_adapter_plugins |
| directory | planning_scene_monitor |
| directory | rdf_loader |
| directory | robot_model_loader |
| directory | trajectory_execution_manager |