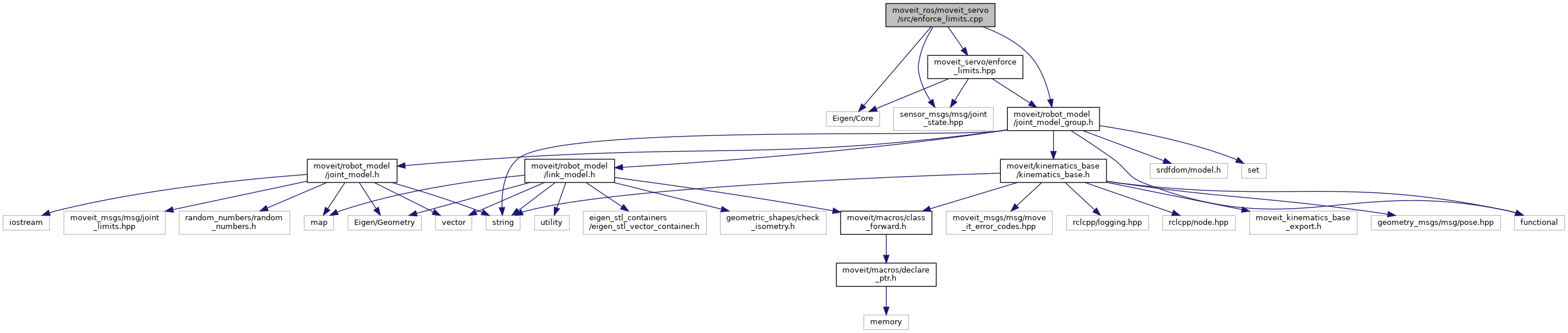
#include <Eigen/Core>#include <sensor_msgs/msg/joint_state.hpp>#include <moveit/robot_model/joint_model_group.h>#include <moveit_servo/enforce_limits.hpp>
Include dependency graph for enforce_limits.cpp:
Go to the source code of this file.
Namespaces | |
| moveit_servo | |
Functions | |
| void | moveit_servo::enforceVelocityLimits (const moveit::core::JointModelGroup *joint_model_group, const double publish_period, sensor_msgs::msg::JointState &joint_state, const double override_velocity_scaling_factor=0.0) |
| Decrease robot position change and velocity, if needed, to satisfy joint velocity limits. More... | |