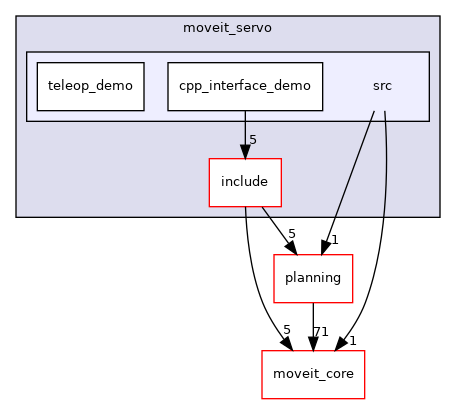
Directory dependency graph for src:
Directories | |
| directory | cpp_interface_demo |
| directory | teleop_demo |
Files | |
| file | collision_check.cpp [code] |
| file | enforce_limits.cpp [code] |
| file | parameter_descriptor_builder.cpp [code] |
| file | pose_tracking.cpp [code] |
| file | servo.cpp [code] |
| file | servo_calcs.cpp [code] |
| file | servo_node.cpp [code] |
| file | servo_node_main.cpp [code] |
| file | servo_parameters.cpp [code] |
| file | utilities.cpp [code] |