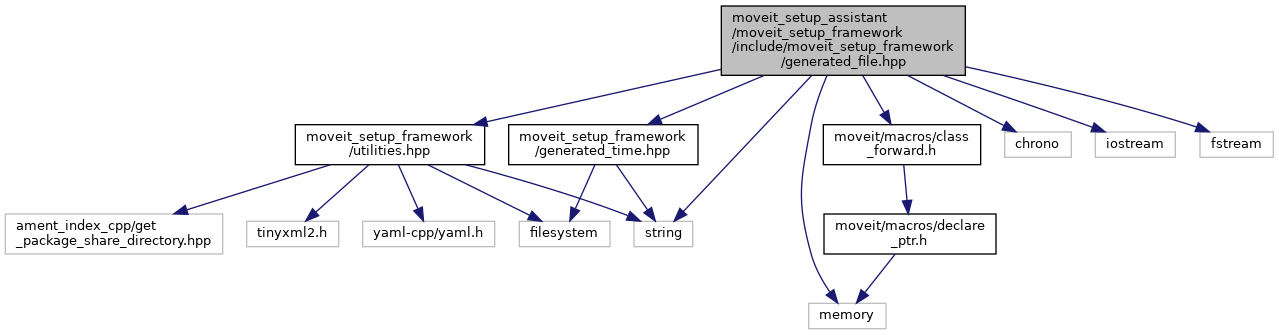
#include <moveit_setup_framework/utilities.hpp>#include <moveit_setup_framework/generated_time.hpp>#include <moveit/macros/class_forward.h>#include <chrono>#include <memory>#include <string>#include <iostream>#include <fstream>
Include dependency graph for generated_file.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | moveit_setup::GeneratedFile |
| Container for the logic for a single file to appear in MoveIt configuration package. More... | |
| class | moveit_setup::YamlGeneratedFile |
Namespaces | |
| moveit_setup | |
Enumerations | |
| enum class | moveit_setup::FileStatus { moveit_setup::NEW , moveit_setup::UNCHANGED , moveit_setup::CHANGED , moveit_setup::EXTERNALLY_MODIFIED , moveit_setup::CONFLICTED } |
| Status associated with each GeneratedFile. More... | |
Functions | |
| moveit_setup::MOVEIT_CLASS_FORWARD (GeneratedFile) | |