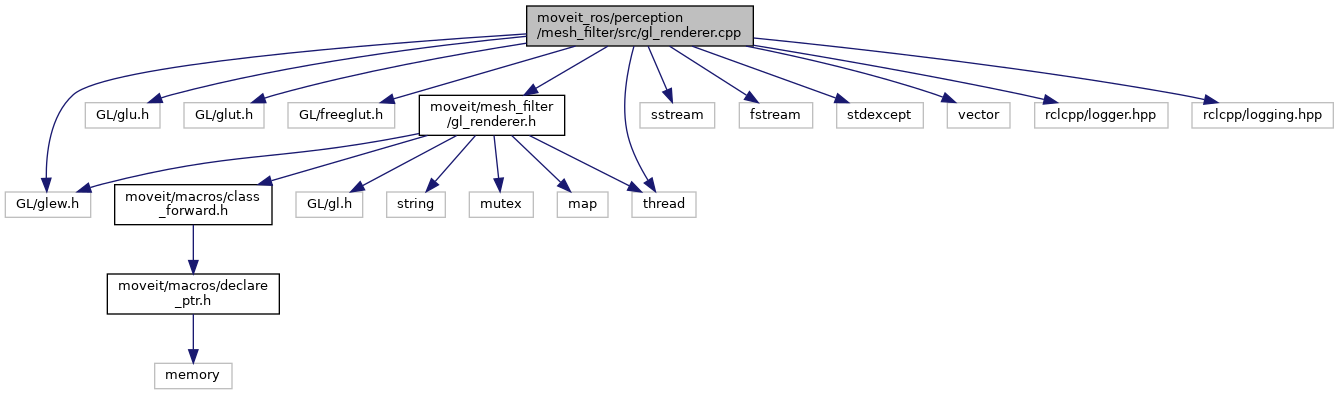
#include <GL/glew.h>#include <GL/glu.h>#include <GL/glut.h>#include <GL/freeglut.h>#include <moveit/mesh_filter/gl_renderer.h>#include <sstream>#include <fstream>#include <stdexcept>#include <vector>#include <thread>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>
Include dependency graph for gl_renderer.cpp: