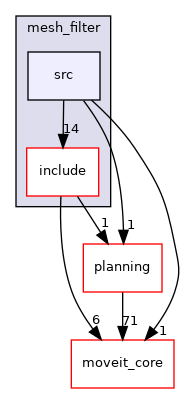
Directory dependency graph for src:
Files | |
| file | depth_self_filter_nodelet.cpp [code] |
| file | gl_mesh.cpp [code] |
| file | gl_renderer.cpp [code] |
| file | mesh_filter.cpp [code] |
| file | mesh_filter_base.cpp [code] |
| file | sensor_model.cpp [code] |
| file | stereo_camera_model.cpp [code] |
| file | transform_provider.cpp [code] |