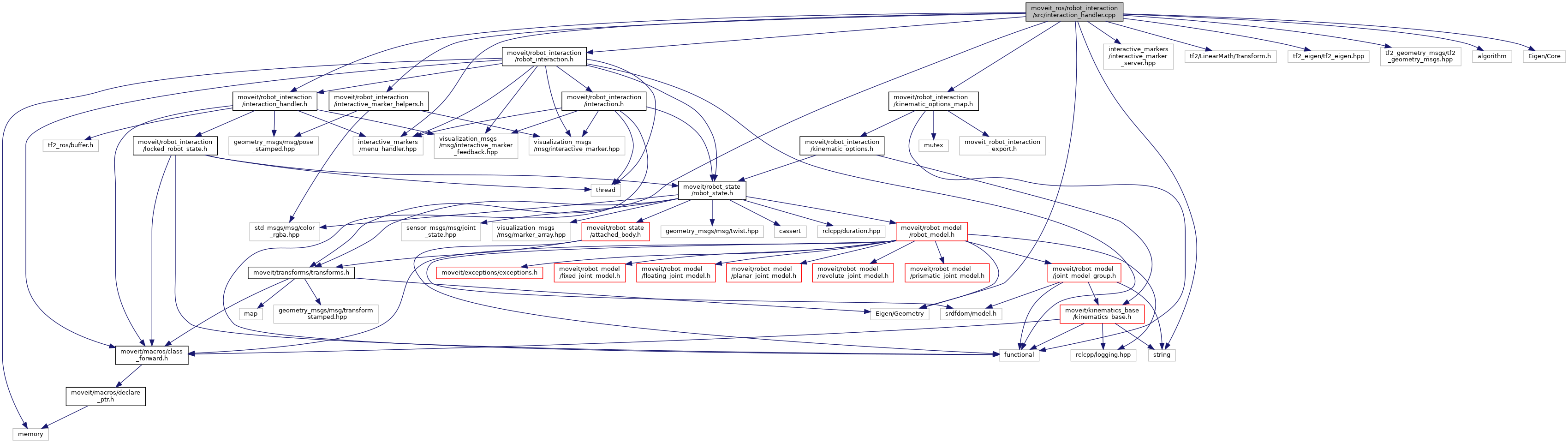
#include <moveit/robot_interaction/interaction_handler.h>#include <moveit/robot_interaction/robot_interaction.h>#include <moveit/robot_interaction/interactive_marker_helpers.h>#include <moveit/robot_interaction/kinematic_options_map.h>#include <moveit/transforms/transforms.h>#include <interactive_markers/interactive_marker_server.hpp>#include <interactive_markers/menu_handler.hpp>#include <tf2/LinearMath/Transform.h>#include <tf2_eigen/tf2_eigen.hpp>#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>#include <algorithm>#include <string>#include <Eigen/Core>#include <Eigen/Geometry>
Include dependency graph for interaction_handler.cpp:
Go to the source code of this file.
Namespaces | |
| robot_interaction | |