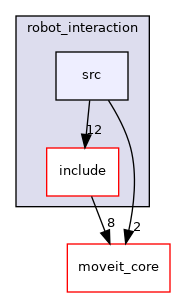
Directory dependency graph for src:
Files | |
| file | interaction_handler.cpp [code] |
| file | interactive_marker_helpers.cpp [code] |
| file | kinematic_options.cpp [code] |
| file | kinematic_options_map.cpp [code] |
| file | locked_robot_state.cpp [code] |
| file | robot_interaction.cpp [code] |