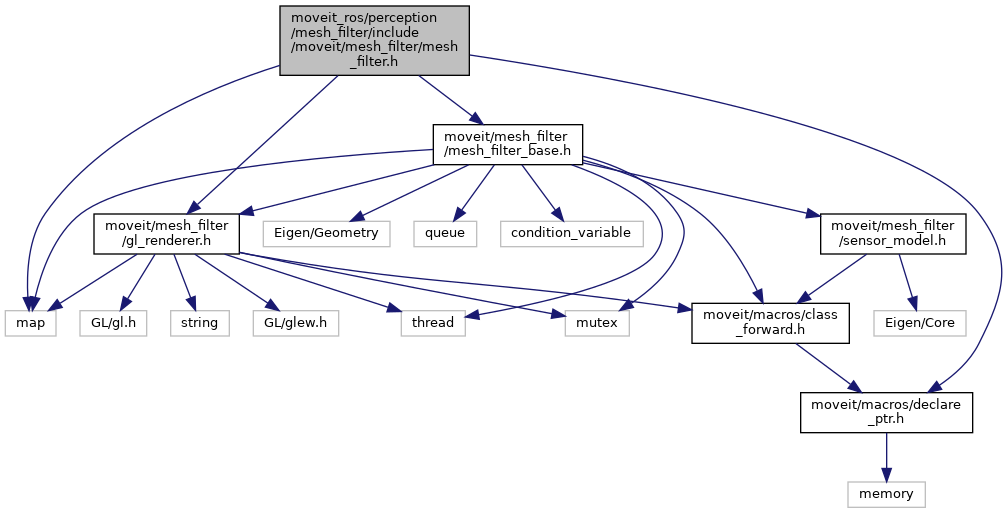
#include <map>#include <moveit/macros/declare_ptr.h>#include <moveit/mesh_filter/gl_renderer.h>#include <moveit/mesh_filter/mesh_filter_base.h>
Include dependency graph for mesh_filter.h:
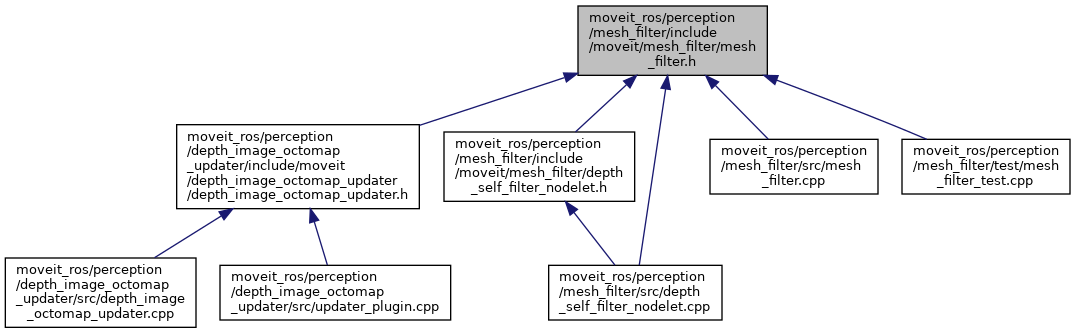
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mesh_filter::MeshFilter< SensorType > |
| MeshFilter filters out points that belong to given meshes in depth-images. More... | |
Namespaces | |
| shapes | |
| mesh_filter | |