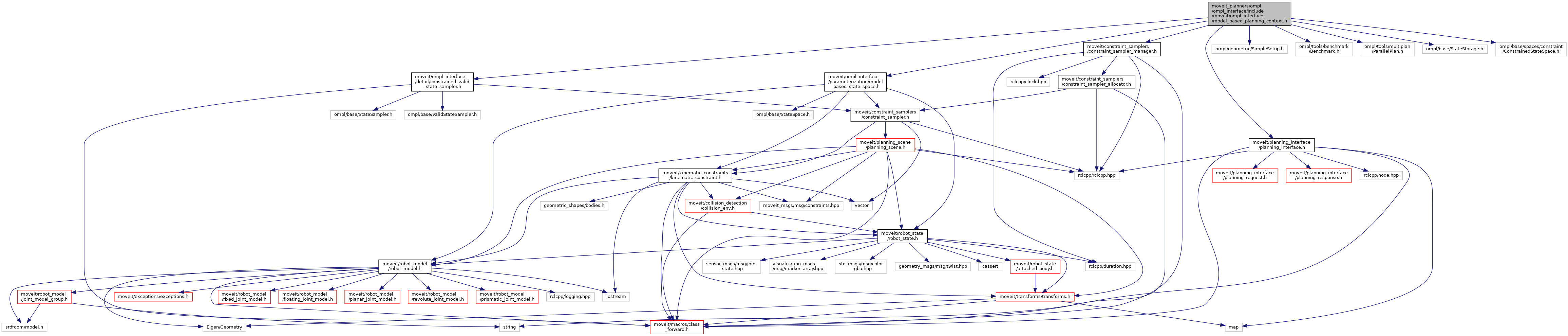
#include <moveit/ompl_interface/parameterization/model_based_state_space.h>#include <moveit/ompl_interface/detail/constrained_valid_state_sampler.h>#include <moveit/constraint_samplers/constraint_sampler_manager.h>#include <moveit/planning_interface/planning_interface.h>#include <ompl/geometric/SimpleSetup.h>#include <ompl/tools/benchmark/Benchmark.h>#include <ompl/tools/multiplan/ParallelPlan.h>#include <ompl/base/StateStorage.h>#include <ompl/base/spaces/constraint/ConstrainedStateSpace.h>
Include dependency graph for model_based_planning_context.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | ompl_interface::ModelBasedPlanningContextSpecification |
| class | ompl_interface::ModelBasedPlanningContext |
Namespaces | |
| ompl_interface | |
| The MoveIt interface to OMPL. | |
Typedefs | |
| typedef std::function< ob::PlannerPtr(const ompl::base::SpaceInformationPtr &si, const std::string &name, const ModelBasedPlanningContextSpecification &spec)> | ompl_interface::ConfiguredPlannerAllocator |
| typedef std::function< ConfiguredPlannerAllocator(const std::string &planner_type)> | ompl_interface::ConfiguredPlannerSelector |
Functions | |
| ompl_interface::MOVEIT_CLASS_FORWARD (ModelBasedPlanningContext) | |
| ompl_interface::MOVEIT_CLASS_FORWARD (ConstraintsLibrary) | |