#include <model_based_planning_context.h>
Public Member Functions | |
| ModelBasedPlanningContext (const std::string &name, const ModelBasedPlanningContextSpecification &spec) | |
| ~ModelBasedPlanningContext () override | |
| bool | solve (planning_interface::MotionPlanResponse &res) override |
| Solve the motion planning problem and store the result in res. This function should not clear data structures before computing. The constructor and clear() do that. More... | |
| bool | solve (planning_interface::MotionPlanDetailedResponse &res) override |
| Solve the motion planning problem and store the detailed result in res. This function should not clear data structures before computing. The constructor and clear() do that. More... | |
| void | clear () override |
| Clear the data structures used by the planner. More... | |
| bool | terminate () override |
| If solve() is running, terminate the computation. Return false if termination not possible. No-op if solve() is not running (returns true). More... | |
| const ModelBasedPlanningContextSpecification & | getSpecification () const |
| const std::map< std::string, std::string > & | getSpecificationConfig () const |
| void | setSpecificationConfig (const std::map< std::string, std::string > &config) |
| const moveit::core::RobotModelConstPtr & | getRobotModel () const |
| const moveit::core::JointModelGroup * | getJointModelGroup () const |
| const moveit::core::RobotState & | getCompleteInitialRobotState () const |
| const ModelBasedStateSpacePtr & | getOMPLStateSpace () const |
| const og::SimpleSetupPtr & | getOMPLSimpleSetup () const |
| og::SimpleSetupPtr & | getOMPLSimpleSetup () |
| const ot::Benchmark & | getOMPLBenchmark () const |
| ot::Benchmark & | getOMPLBenchmark () |
| const kinematic_constraints::KinematicConstraintSetPtr & | getPathConstraints () const |
| unsigned int | getMaximumStateSamplingAttempts () const |
| void | setMaximumStateSamplingAttempts (unsigned int max_state_sampling_attempts) |
| unsigned int | getMaximumGoalSamplingAttempts () const |
| void | setMaximumGoalSamplingAttempts (unsigned int max_goal_sampling_attempts) |
| unsigned int | getMaximumGoalSamples () const |
| void | setMaximumGoalSamples (unsigned int max_goal_samples) |
| unsigned int | getMaximumPlanningThreads () const |
| void | setMaximumPlanningThreads (unsigned int max_planning_threads) |
| double | getMaximumSolutionSegmentLength () const |
| void | setMaximumSolutionSegmentLength (double mssl) |
| unsigned int | getMinimumWaypointCount () const |
| void | setMinimumWaypointCount (unsigned int mwc) |
| Get the minimum number of waypoints along the solution path. More... | |
| const constraint_samplers::ConstraintSamplerManagerPtr & | getConstraintSamplerManager () |
| void | setConstraintSamplerManager (const constraint_samplers::ConstraintSamplerManagerPtr &csm) |
| void | setVerboseStateValidityChecks (bool flag) |
| void | setProjectionEvaluator (const std::string &peval) |
| void | setPlanningVolume (const moveit_msgs::msg::WorkspaceParameters &wparams) |
| void | setCompleteInitialState (const moveit::core::RobotState &complete_initial_robot_state) |
| bool | setGoalConstraints (const std::vector< moveit_msgs::msg::Constraints > &goal_constraints, const moveit_msgs::msg::Constraints &path_constraints, moveit_msgs::msg::MoveItErrorCodes *error) |
| bool | setPathConstraints (const moveit_msgs::msg::Constraints &path_constraints, moveit_msgs::msg::MoveItErrorCodes *error) |
| void | setConstraintsApproximations (const ConstraintsLibraryPtr &constraints_library) |
| ConstraintsLibraryPtr | getConstraintsLibraryNonConst () |
| const ConstraintsLibraryPtr & | getConstraintsLibrary () const |
| bool | simplifySolutions () const |
| void | simplifySolutions (bool flag) |
| void | setInterpolation (bool flag) |
| void | setHybridize (bool flag) |
| const moveit_msgs::msg::MoveItErrorCodes | solve (double timeout, unsigned int count) |
| bool | benchmark (double timeout, unsigned int count, const std::string &filename="") |
| double | getLastPlanTime () const |
| double | getLastSimplifyTime () const |
| void | simplifySolution (double timeout) |
| void | interpolateSolution () |
| bool | getSolutionPath (robot_trajectory::RobotTrajectory &traj) const |
| void | convertPath (const og::PathGeometric &pg, robot_trajectory::RobotTrajectory &traj) const |
| bool | loadConstraintApproximations (const rclcpp::Node::SharedPtr &node) |
| Look up param server 'constraint_approximations' and use its value as the path to load constraint approximations to. More... | |
| bool | saveConstraintApproximations (const rclcpp::Node::SharedPtr &node) |
| Look up param server 'constraint_approximations' and use its value as the path to save constraint approximations to. More... | |
| virtual void | configure (const rclcpp::Node::SharedPtr &node, bool use_constraints_approximations) |
| Configure ompl_simple_setup_ and optionally the constraints_library_. More... | |
 Public Member Functions inherited from planning_interface::PlanningContext Public Member Functions inherited from planning_interface::PlanningContext | |
| PlanningContext (const std::string &name, const std::string &group) | |
| Construct a planning context named name for the group group. More... | |
| virtual | ~PlanningContext () |
| const std::string & | getGroupName () const |
| Get the name of the group this planning context is for. More... | |
| const std::string & | getName () const |
| Get the name of this planning context. More... | |
| const planning_scene::PlanningSceneConstPtr & | getPlanningScene () const |
| Get the planning scene associated to this planning context. More... | |
| const MotionPlanRequest & | getMotionPlanRequest () const |
| Get the motion plan request associated to this planning context. More... | |
| void | setPlanningScene (const planning_scene::PlanningSceneConstPtr &planning_scene) |
| Set the planning scene for this context. More... | |
| void | setMotionPlanRequest (const MotionPlanRequest &request) |
| Set the planning request for this context. More... | |
Protected Member Functions | |
| void | preSolve () |
| void | postSolve () |
| void | startSampling () |
| void | stopSampling () |
| virtual ob::ProjectionEvaluatorPtr | getProjectionEvaluator (const std::string &peval) const |
| virtual ob::StateSamplerPtr | allocPathConstrainedSampler (const ompl::base::StateSpace *ss) const |
| virtual void | useConfig () |
| virtual ob::GoalPtr | constructGoal () |
| virtual ob::PlannerTerminationCondition | constructPlannerTerminationCondition (double timeout, const ompl::time::point &start) |
| void | registerTerminationCondition (const ob::PlannerTerminationCondition &ptc) |
| void | unregisterTerminationCondition () |
| int32_t | logPlannerStatus (const og::SimpleSetupPtr &ompl_simple_setup) |
| Convert OMPL PlannerStatus to moveit_msgs::msg::MoveItErrorCode. More... | |
Protected Attributes | |
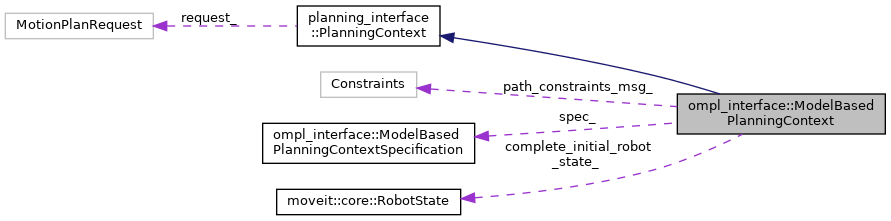
| ModelBasedPlanningContextSpecification | spec_ |
| moveit::core::RobotState | complete_initial_robot_state_ |
| og::SimpleSetupPtr | ompl_simple_setup_ |
| the OMPL planning context; this contains the problem definition and the planner used More... | |
| ot::Benchmark | ompl_benchmark_ |
| the OMPL tool for benchmarking planners More... | |
| ot::ParallelPlan | ompl_parallel_plan_ |
| tool used to compute multiple plans in parallel; this uses the problem definition maintained by ompl_simple_setup_ More... | |
| std::vector< int > | space_signature_ |
| kinematic_constraints::KinematicConstraintSetPtr | path_constraints_ |
| moveit_msgs::msg::Constraints | path_constraints_msg_ |
| std::vector< kinematic_constraints::KinematicConstraintSetPtr > | goal_constraints_ |
| const ob::PlannerTerminationCondition * | ptc_ |
| std::mutex | ptc_lock_ |
| double | last_plan_time_ |
| the time spent computing the last plan More... | |
| double | last_simplify_time_ |
| the time spent simplifying the last plan More... | |
| unsigned int | max_goal_samples_ |
| unsigned int | max_state_sampling_attempts_ |
| unsigned int | max_goal_sampling_attempts_ |
| maximum number of attempts to be made at sampling a goal states More... | |
| unsigned int | max_planning_threads_ |
| when planning in parallel, this is the maximum number of threads to use at one time More... | |
| double | max_solution_segment_length_ |
| unsigned int | minimum_waypoint_count_ |
| bool | multi_query_planning_enabled_ |
| when false, clears planners before running solve() More... | |
| ConstraintsLibraryPtr | constraints_library_ |
| bool | simplify_solutions_ |
| bool | interpolate_ |
| bool | hybridize_ |
| Protected Attributes inherited from planning_interface::PlanningContext | |
| std::string | name_ |
| The name of this planning context. More... | |
| std::string | group_ |
| The group (as in the SRDF) this planning context is for. More... | |
| planning_scene::PlanningSceneConstPtr | planning_scene_ |
| The planning scene for this context. More... | |
| MotionPlanRequest | request_ |
| The planning request for this context. More... | |
Detailed Description
Definition at line 88 of file model_based_planning_context.h.
Constructor & Destructor Documentation
◆ ModelBasedPlanningContext()
| ompl_interface::ModelBasedPlanningContext::ModelBasedPlanningContext | ( | const std::string & | name, |
| const ModelBasedPlanningContextSpecification & | spec | ||
| ) |
Definition at line 75 of file model_based_planning_context.cpp.

◆ ~ModelBasedPlanningContext()
|
inlineoverride |
Definition at line 93 of file model_based_planning_context.h.
Member Function Documentation
◆ allocPathConstrainedSampler()
|
protectedvirtual |
Definition at line 226 of file model_based_planning_context.cpp.
◆ benchmark()
| bool ompl_interface::ModelBasedPlanningContext::benchmark | ( | double | timeout, |
| unsigned int | count, | ||
| const std::string & | filename = "" |
||
| ) |
Definition at line 691 of file model_based_planning_context.cpp.
◆ clear()
|
overridevirtual |
Clear the data structures used by the planner.
Implements planning_interface::PlanningContext.
Definition at line 618 of file model_based_planning_context.cpp.
◆ configure()
|
virtual |
Configure ompl_simple_setup_ and optionally the constraints_library_.
ompl_simple_setup_ gets a start state, state sampler, and state validity checker.
- Parameters
-
node ROS node used to load the constraint approximations. use_constraints_approximations Set to true if we want to load the constraint approximation.
Definition at line 103 of file model_based_planning_context.cpp.
◆ constructGoal()
|
protectedvirtual |
Definition at line 505 of file model_based_planning_context.cpp.
◆ constructPlannerTerminationCondition()
|
protectedvirtual |
Definition at line 539 of file model_based_planning_context.cpp.

◆ convertPath()
| void ompl_interface::ModelBasedPlanningContext::convertPath | ( | const og::PathGeometric & | pg, |
| robot_trajectory::RobotTrajectory & | traj | ||
| ) | const |
Definition at line 476 of file model_based_planning_context.cpp.

◆ getCompleteInitialRobotState()
|
inline |
Definition at line 128 of file model_based_planning_context.h.
◆ getConstraintSamplerManager()
|
inline |
Definition at line 234 of file model_based_planning_context.h.
◆ getConstraintsLibrary()
|
inline |
Definition at line 268 of file model_based_planning_context.h.
◆ getConstraintsLibraryNonConst()
|
inline |
Definition at line 263 of file model_based_planning_context.h.
◆ getJointModelGroup()
|
inline |
Definition at line 123 of file model_based_planning_context.h.
◆ getLastPlanTime()
|
inline |
Definition at line 308 of file model_based_planning_context.h.
◆ getLastSimplifyTime()
|
inline |
Definition at line 314 of file model_based_planning_context.h.
◆ getMaximumGoalSamples()
|
inline |
Definition at line 188 of file model_based_planning_context.h.
◆ getMaximumGoalSamplingAttempts()
|
inline |
Definition at line 176 of file model_based_planning_context.h.
◆ getMaximumPlanningThreads()
|
inline |
Definition at line 200 of file model_based_planning_context.h.
◆ getMaximumSolutionSegmentLength()
|
inline |
Definition at line 212 of file model_based_planning_context.h.
◆ getMaximumStateSamplingAttempts()
|
inline |
Definition at line 164 of file model_based_planning_context.h.
◆ getMinimumWaypointCount()
|
inline |
Definition at line 223 of file model_based_planning_context.h.
◆ getOMPLBenchmark() [1/2]
|
inline |
Definition at line 153 of file model_based_planning_context.h.
◆ getOMPLBenchmark() [2/2]
|
inline |
Definition at line 148 of file model_based_planning_context.h.
◆ getOMPLSimpleSetup() [1/2]
|
inline |
Definition at line 143 of file model_based_planning_context.h.
◆ getOMPLSimpleSetup() [2/2]
|
inline |
Definition at line 138 of file model_based_planning_context.h.
◆ getOMPLStateSpace()
|
inline |
Definition at line 133 of file model_based_planning_context.h.
◆ getPathConstraints()
|
inline |
Definition at line 158 of file model_based_planning_context.h.
◆ getProjectionEvaluator()
|
protectedvirtual |
Definition at line 162 of file model_based_planning_context.cpp.
◆ getRobotModel()
|
inline |
Definition at line 118 of file model_based_planning_context.h.
◆ getSolutionPath()
| bool ompl_interface::ModelBasedPlanningContext::getSolutionPath | ( | robot_trajectory::RobotTrajectory & | traj | ) | const |
Definition at line 487 of file model_based_planning_context.cpp.

◆ getSpecification()
|
inline |
Definition at line 103 of file model_based_planning_context.h.
◆ getSpecificationConfig()
|
inline |
Definition at line 108 of file model_based_planning_context.h.
◆ interpolateSolution()
| void ompl_interface::ModelBasedPlanningContext::interpolateSolution | ( | ) |
Definition at line 448 of file model_based_planning_context.cpp.
◆ loadConstraintApproximations()
| bool ompl_interface::ModelBasedPlanningContext::loadConstraintApproximations | ( | const rclcpp::Node::SharedPtr & | node | ) |
Look up param server 'constraint_approximations' and use its value as the path to load constraint approximations to.
Definition at line 1057 of file model_based_planning_context.cpp.
◆ logPlannerStatus()
|
protected |
Convert OMPL PlannerStatus to moveit_msgs::msg::MoveItErrorCode.
Definition at line 975 of file model_based_planning_context.cpp.
◆ postSolve()
|
protected |
Definition at line 750 of file model_based_planning_context.cpp.
◆ preSolve()
|
protected |
Definition at line 737 of file model_based_planning_context.cpp.
◆ registerTerminationCondition()
|
protected |
Definition at line 963 of file model_based_planning_context.cpp.
◆ saveConstraintApproximations()
| bool ompl_interface::ModelBasedPlanningContext::saveConstraintApproximations | ( | const rclcpp::Node::SharedPtr & | node | ) |
Look up param server 'constraint_approximations' and use its value as the path to save constraint approximations to.
Definition at line 1045 of file model_based_planning_context.cpp.
◆ setCompleteInitialState()
| void ompl_interface::ModelBasedPlanningContext::setCompleteInitialState | ( | const moveit::core::RobotState & | complete_initial_robot_state | ) |
Definition at line 611 of file model_based_planning_context.cpp.

◆ setConstraintSamplerManager()
|
inline |
Definition at line 239 of file model_based_planning_context.h.
◆ setConstraintsApproximations()
|
inline |
Definition at line 258 of file model_based_planning_context.h.
◆ setGoalConstraints()
| bool ompl_interface::ModelBasedPlanningContext::setGoalConstraints | ( | const std::vector< moveit_msgs::msg::Constraints > & | goal_constraints, |
| const moveit_msgs::msg::Constraints & | path_constraints, | ||
| moveit_msgs::msg::MoveItErrorCodes * | error | ||
| ) |
Definition at line 658 of file model_based_planning_context.cpp.

◆ setHybridize()
|
inline |
Definition at line 288 of file model_based_planning_context.h.
◆ setInterpolation()
|
inline |
Definition at line 283 of file model_based_planning_context.h.
◆ setMaximumGoalSamples()
|
inline |
Definition at line 194 of file model_based_planning_context.h.
◆ setMaximumGoalSamplingAttempts()
|
inline |
Definition at line 182 of file model_based_planning_context.h.
◆ setMaximumPlanningThreads()
|
inline |
Definition at line 206 of file model_based_planning_context.h.
◆ setMaximumSolutionSegmentLength()
|
inline |
Definition at line 218 of file model_based_planning_context.h.
◆ setMaximumStateSamplingAttempts()
|
inline |
Definition at line 170 of file model_based_planning_context.h.
◆ setMinimumWaypointCount()
|
inline |
Get the minimum number of waypoints along the solution path.
Definition at line 229 of file model_based_planning_context.h.
◆ setPathConstraints()
| bool ompl_interface::ModelBasedPlanningContext::setPathConstraints | ( | const moveit_msgs::msg::Constraints & | path_constraints, |
| moveit_msgs::msg::MoveItErrorCodes * | error | ||
| ) |
Definition at line 647 of file model_based_planning_context.cpp.
◆ setPlanningVolume()
| void ompl_interface::ModelBasedPlanningContext::setPlanningVolume | ( | const moveit_msgs::msg::WorkspaceParameters & | wparams | ) |
Definition at line 419 of file model_based_planning_context.cpp.
◆ setProjectionEvaluator()
| void ompl_interface::ModelBasedPlanningContext::setProjectionEvaluator | ( | const std::string & | peval | ) |
Definition at line 149 of file model_based_planning_context.cpp.
◆ setSpecificationConfig()
|
inline |
Definition at line 113 of file model_based_planning_context.h.
◆ setVerboseStateValidityChecks()
| void ompl_interface::ModelBasedPlanningContext::setVerboseStateValidityChecks | ( | bool | flag | ) |
Definition at line 497 of file model_based_planning_context.cpp.
◆ simplifySolution()
| void ompl_interface::ModelBasedPlanningContext::simplifySolution | ( | double | timeout | ) |
Definition at line 438 of file model_based_planning_context.cpp.
◆ simplifySolutions() [1/2]
|
inline |
Definition at line 273 of file model_based_planning_context.h.
◆ simplifySolutions() [2/2]
|
inline |
Definition at line 278 of file model_based_planning_context.h.
◆ solve() [1/3]
| const moveit_msgs::msg::MoveItErrorCodes ompl_interface::ModelBasedPlanningContext::solve | ( | double | timeout, |
| unsigned int | count | ||
| ) |
Definition at line 851 of file model_based_planning_context.cpp.
◆ solve() [2/3]
|
overridevirtual |
Solve the motion planning problem and store the detailed result in res. This function should not clear data structures before computing. The constructor and clear() do that.
Implements planning_interface::PlanningContext.
Definition at line 800 of file model_based_planning_context.cpp.
◆ solve() [3/3]
|
overridevirtual |
Solve the motion planning problem and store the result in res. This function should not clear data structures before computing. The constructor and clear() do that.
Implements planning_interface::PlanningContext.
Definition at line 767 of file model_based_planning_context.cpp.
◆ startSampling()
|
protected |
Definition at line 709 of file model_based_planning_context.cpp.
◆ stopSampling()
|
protected |
Definition at line 723 of file model_based_planning_context.cpp.
◆ terminate()
|
overridevirtual |
If solve() is running, terminate the computation. Return false if termination not possible. No-op if solve() is not running (returns true).
Implements planning_interface::PlanningContext.
Definition at line 1035 of file model_based_planning_context.cpp.
◆ unregisterTerminationCondition()
|
protected |
Definition at line 969 of file model_based_planning_context.cpp.
◆ useConfig()
|
protectedvirtual |
Definition at line 275 of file model_based_planning_context.cpp.

Member Data Documentation
◆ complete_initial_robot_state_
|
protected |
Definition at line 396 of file model_based_planning_context.h.
◆ constraints_library_
|
protected |
Definition at line 447 of file model_based_planning_context.h.
◆ goal_constraints_
|
protected |
Definition at line 411 of file model_based_planning_context.h.
◆ hybridize_
|
protected |
Definition at line 455 of file model_based_planning_context.h.
◆ interpolate_
|
protected |
Definition at line 452 of file model_based_planning_context.h.
◆ last_plan_time_
|
protected |
the time spent computing the last plan
Definition at line 417 of file model_based_planning_context.h.
◆ last_simplify_time_
|
protected |
the time spent simplifying the last plan
Definition at line 420 of file model_based_planning_context.h.
◆ max_goal_samples_
|
protected |
maximum number of valid states to store in the goal region for any planning request (when such sampling is possible)
Definition at line 424 of file model_based_planning_context.h.
◆ max_goal_sampling_attempts_
|
protected |
maximum number of attempts to be made at sampling a goal states
Definition at line 431 of file model_based_planning_context.h.
◆ max_planning_threads_
|
protected |
when planning in parallel, this is the maximum number of threads to use at one time
Definition at line 434 of file model_based_planning_context.h.
◆ max_solution_segment_length_
|
protected |
the maximum length that is allowed for segments that make up the motion plan; by default this is 1% from the extent of the space
Definition at line 438 of file model_based_planning_context.h.
◆ max_state_sampling_attempts_
|
protected |
maximum number of attempts to be made at sampling a state when attempting to find valid states that satisfy some set of constraints
Definition at line 428 of file model_based_planning_context.h.
◆ minimum_waypoint_count_
|
protected |
the minimum number of points to include on the solution path (interpolation is used to reach this number, if needed)
Definition at line 442 of file model_based_planning_context.h.
◆ multi_query_planning_enabled_
|
protected |
when false, clears planners before running solve()
Definition at line 445 of file model_based_planning_context.h.
◆ ompl_benchmark_
|
protected |
the OMPL tool for benchmarking planners
Definition at line 402 of file model_based_planning_context.h.
◆ ompl_parallel_plan_
|
protected |
tool used to compute multiple plans in parallel; this uses the problem definition maintained by ompl_simple_setup_
Definition at line 405 of file model_based_planning_context.h.
◆ ompl_simple_setup_
|
protected |
the OMPL planning context; this contains the problem definition and the planner used
Definition at line 399 of file model_based_planning_context.h.
◆ path_constraints_
|
protected |
Definition at line 409 of file model_based_planning_context.h.
◆ path_constraints_msg_
|
protected |
Definition at line 410 of file model_based_planning_context.h.
◆ ptc_
|
protected |
Definition at line 413 of file model_based_planning_context.h.
◆ ptc_lock_
|
protected |
Definition at line 414 of file model_based_planning_context.h.
◆ simplify_solutions_
|
protected |
Definition at line 449 of file model_based_planning_context.h.
◆ space_signature_
|
protected |
Definition at line 407 of file model_based_planning_context.h.
◆ spec_
|
protected |
Definition at line 394 of file model_based_planning_context.h.
The documentation for this class was generated from the following files:
- moveit_planners/ompl/ompl_interface/include/moveit/ompl_interface/model_based_planning_context.h
- moveit_planners/ompl/ompl_interface/src/model_based_planning_context.cpp