Functions | |
| def | load_file (package_name, file_path) |
| def | load_yaml (package_name, file_path) |
| def | get_robot_description () |
| def | get_robot_description_semantic () |
| def | generate_common_hybrid_launch_description () |
Function Documentation
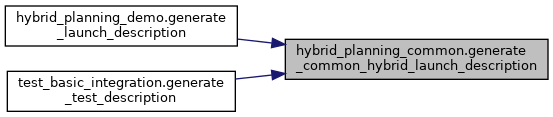
◆ generate_common_hybrid_launch_description()
| def hybrid_planning_common.generate_common_hybrid_launch_description | ( | ) |
Definition at line 57 of file hybrid_planning_common.py.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ get_robot_description()
| def hybrid_planning_common.get_robot_description | ( | ) |
Definition at line 35 of file hybrid_planning_common.py.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ get_robot_description_semantic()
| def hybrid_planning_common.get_robot_description_semantic | ( | ) |
Definition at line 47 of file hybrid_planning_common.py.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ load_file()
| def hybrid_planning_common.load_file | ( | package_name, | |
| file_path | |||
| ) |
Definition at line 13 of file hybrid_planning_common.py.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ load_yaml()
| def hybrid_planning_common.load_yaml | ( | package_name, | |
| file_path | |||
| ) |
Definition at line 24 of file hybrid_planning_common.py.
Here is the call graph for this function:

Here is the caller graph for this function:
