Classes | |
| class | KinematicsPluginLoader |
| Helper class for loading kinematics solvers. More... | |
Functions | |
| MOVEIT_CLASS_FORWARD (KinematicsPluginLoader) | |
| template<rclcpp::ParameterType ParamType> | |
| rclcpp::Parameter | declare_parameter (const rclcpp::Node::SharedPtr &node, const std::string ¶meter_name) |
Variables | |
| rclcpp::Logger | LOGGER = rclcpp::get_logger("kinematics_plugin_loader") |
Function Documentation
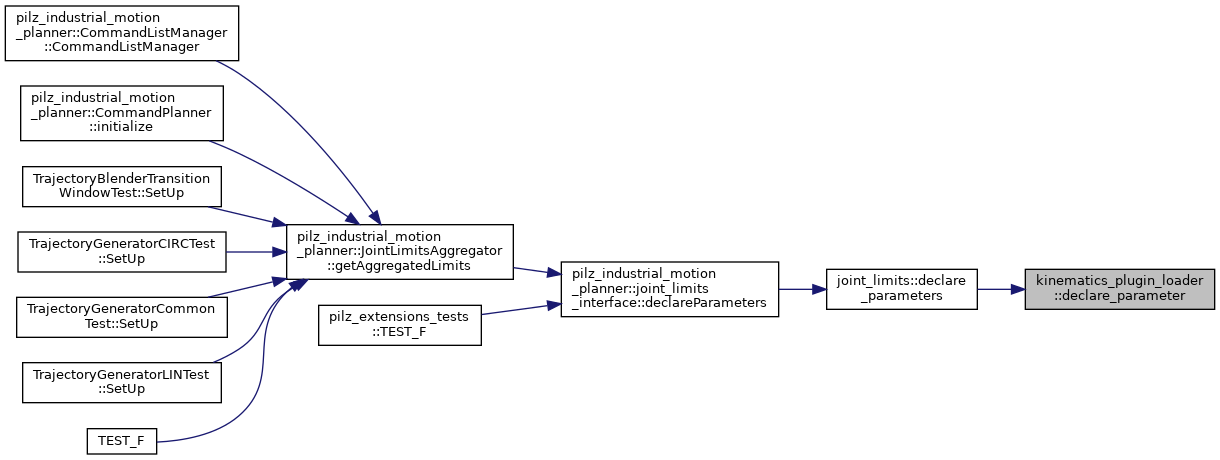
◆ declare_parameter()
template<rclcpp::ParameterType ParamType>
| rclcpp::Parameter kinematics_plugin_loader::declare_parameter | ( | const rclcpp::Node::SharedPtr & | node, |
| const std::string & | parameter_name | ||
| ) |
Definition at line 55 of file kinematics_plugin_loader.cpp.
Here is the caller graph for this function:
◆ MOVEIT_CLASS_FORWARD()
| kinematics_plugin_loader::MOVEIT_CLASS_FORWARD | ( | KinematicsPluginLoader | ) |
Variable Documentation
◆ LOGGER
| rclcpp::Logger kinematics_plugin_loader::LOGGER = rclcpp::get_logger("kinematics_plugin_loader") |
Definition at line 52 of file kinematics_plugin_loader.cpp.