Classes | |
| class | PR2ArmIK |
| class | PR2ArmIKSolver |
| class | PR2ArmKinematicsPlugin |
Functions | |
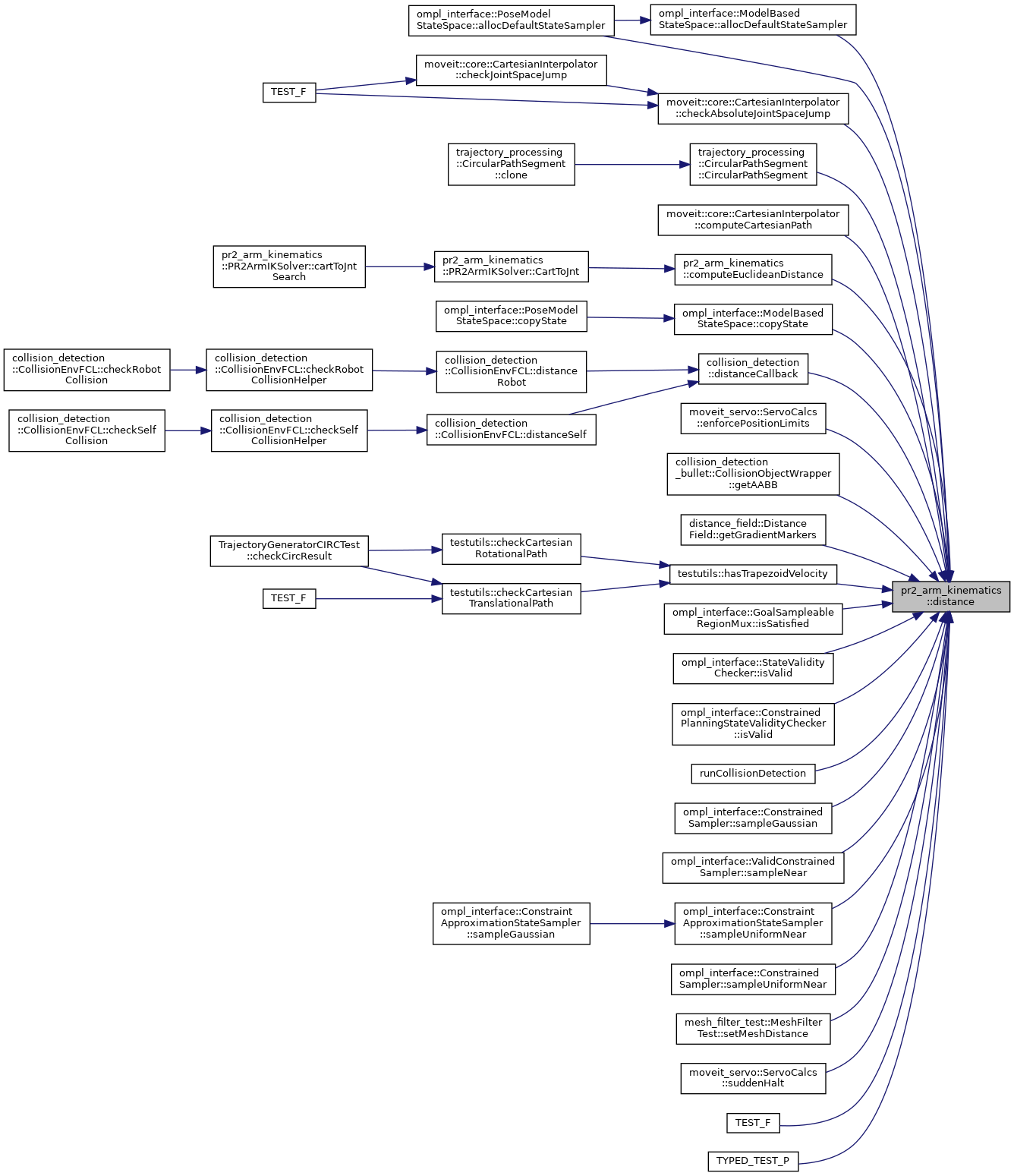
| double | distance (const urdf::Pose &transform) |
| bool | solveQuadratic (const double &a, const double &b, const double &c, double *x1, double *x2) |
| bool | solveCosineEqn (const double &a, const double &b, const double &c, double &soln1, double &soln2) |
| bool | getKDLChain (const urdf::ModelInterface &model, const std::string &root_name, const std::string &tip_name, KDL::Chain &kdl_chain) |
| Eigen::Isometry3f | KDLToEigenMatrix (const KDL::Frame &p) |
| double | computeEuclideanDistance (const std::vector< double > &array_1, const KDL::JntArray &array_2) |
| void | getKDLChainInfo (const KDL::Chain &chain, moveit_msgs::msg::KinematicSolverInfo &chain_info) |
| MOVEIT_CLASS_FORWARD (PR2ArmIKSolver) | |
| MOVEIT_CLASS_FORWARD (PR2ArmKinematicsPlugin) | |
Function Documentation
◆ computeEuclideanDistance()
| double pr2_arm_kinematics::computeEuclideanDistance | ( | const std::vector< double > & | array_1, |
| const KDL::JntArray & | array_2 | ||
| ) |
Definition at line 237 of file pr2_arm_kinematics_plugin.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ distance()
|
inline |
◆ getKDLChain()
| bool pr2_arm_kinematics::getKDLChain | ( | const urdf::ModelInterface & | model, |
| const std::string & | root_name, | ||
| const std::string & | tip_name, | ||
| KDL::Chain & | kdl_chain | ||
| ) |
Definition at line 205 of file pr2_arm_kinematics_plugin.cpp.
Here is the caller graph for this function:

◆ getKDLChainInfo()
| void pr2_arm_kinematics::getKDLChainInfo | ( | const KDL::Chain & | chain, |
| moveit_msgs::msg::KinematicSolverInfo & | chain_info | ||
| ) |
Definition at line 247 of file pr2_arm_kinematics_plugin.cpp.
Here is the caller graph for this function:

◆ KDLToEigenMatrix()
| Eigen::Isometry3f pr2_arm_kinematics::KDLToEigenMatrix | ( | const KDL::Frame & | p | ) |
Definition at line 223 of file pr2_arm_kinematics_plugin.cpp.
Here is the caller graph for this function:

◆ MOVEIT_CLASS_FORWARD() [1/2]
| pr2_arm_kinematics::MOVEIT_CLASS_FORWARD | ( | PR2ArmIKSolver | ) |
◆ MOVEIT_CLASS_FORWARD() [2/2]
| pr2_arm_kinematics::MOVEIT_CLASS_FORWARD | ( | PR2ArmKinematicsPlugin | ) |
◆ solveCosineEqn()
|
inline |
Definition at line 91 of file pr2_arm_ik.h.
◆ solveQuadratic()
|
inline |
Definition at line 61 of file pr2_arm_ik.h.