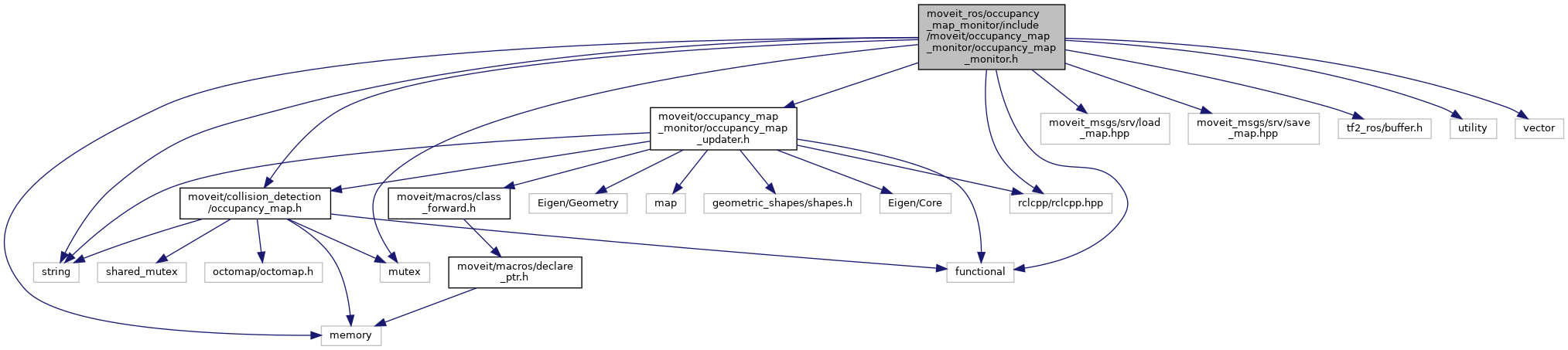
#include <moveit/collision_detection/occupancy_map.h>#include <moveit/occupancy_map_monitor/occupancy_map_updater.h>#include <moveit_msgs/srv/load_map.hpp>#include <moveit_msgs/srv/save_map.hpp>#include <rclcpp/rclcpp.hpp>#include <tf2_ros/buffer.h>#include <functional>#include <memory>#include <mutex>#include <string>#include <utility>#include <vector>
Include dependency graph for occupancy_map_monitor.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | occupancy_map_monitor::OccupancyMapMonitor |
| struct | occupancy_map_monitor::OccupancyMapMonitor::Parameters |
| This class describes parameters that are normally provided through ROS Parameters. More... | |
| class | occupancy_map_monitor::OccupancyMapMonitor::MiddlewareHandle |
| This class contains the rcl interfaces for easier testing. More... | |
Namespaces | |
| occupancy_map_monitor | |