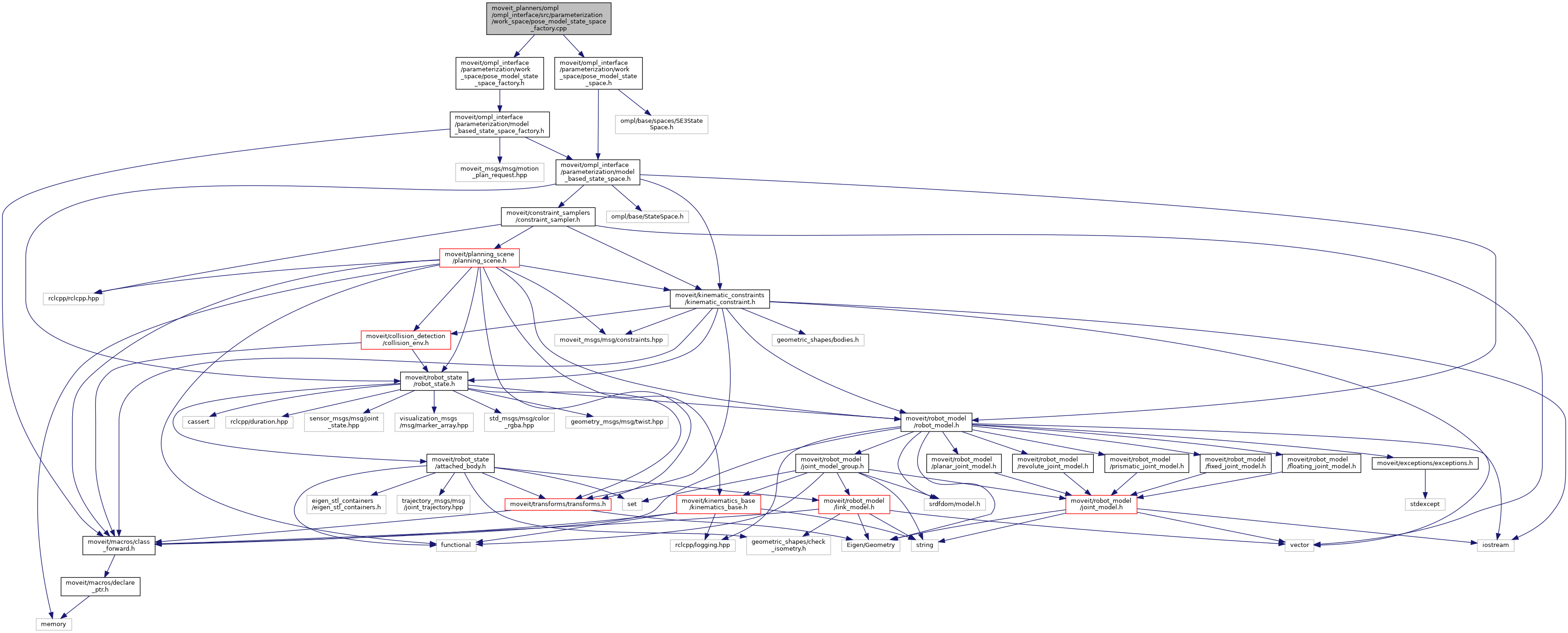
#include <moveit/ompl_interface/parameterization/work_space/pose_model_state_space_factory.h>#include <moveit/ompl_interface/parameterization/work_space/pose_model_state_space.h>
Include dependency graph for pose_model_state_space_factory.cpp:
|
moveit2
The MoveIt Motion Planning Framework for ROS 2.
|
#include <moveit/ompl_interface/parameterization/work_space/pose_model_state_space_factory.h>#include <moveit/ompl_interface/parameterization/work_space/pose_model_state_space.h>