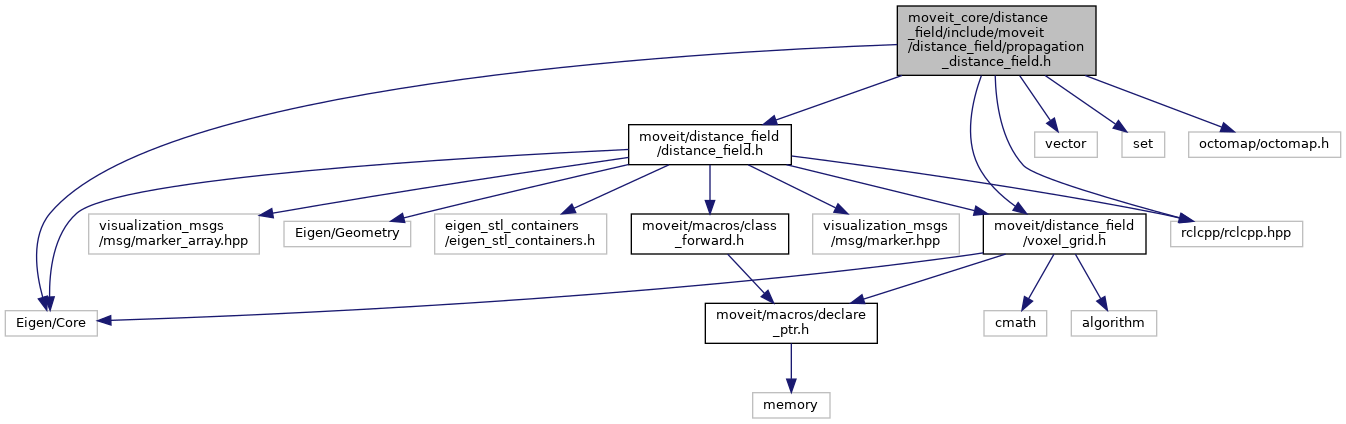
#include <moveit/distance_field/voxel_grid.h>#include <moveit/distance_field/distance_field.h>#include <vector>#include <Eigen/Core>#include <set>#include <octomap/octomap.h>#include <rclcpp/rclcpp.hpp>
Include dependency graph for propagation_distance_field.h:
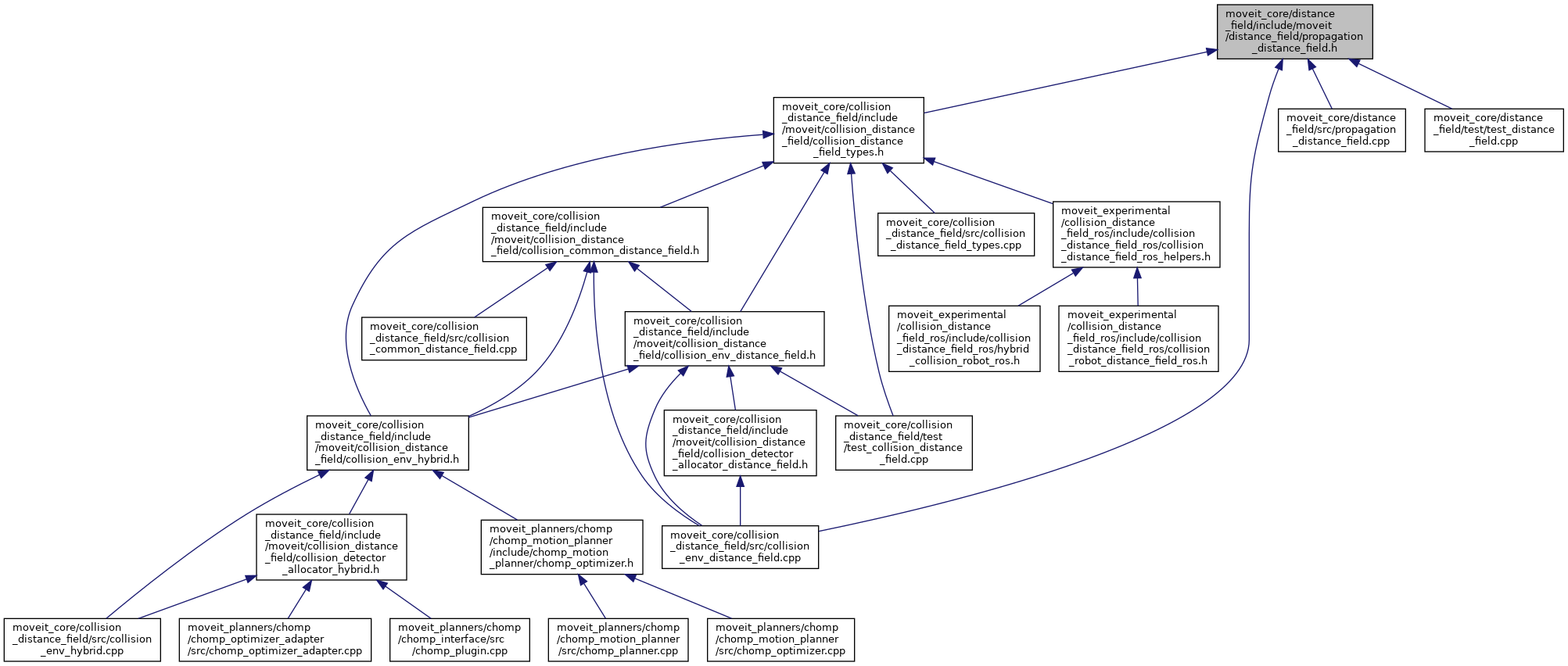
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | distance_field::CompareEigenVector3i |
| Struct for sorting type Eigen::Vector3i for use in sorted std containers. Sorts in z order, then y order, then x order. More... | |
| struct | distance_field::PropDistanceFieldVoxel |
| Structure that holds voxel information for the DistanceField. Will be used in VoxelGrid. More... | |
| class | distance_field::PropagationDistanceField |
| A DistanceField implementation that uses a vector propagation method. Distances propagate outward from occupied cells, or inwards from unoccupied cells if negative distances are to be computed, which is optional. Outward and inward propagation only occur to a desired maximum distance - cells that are more than this maximum distance from the nearest cell will have maximum distance measurements. More... | |
Namespaces | |
| EigenSTL | |
| distance_field | |
| Namespace for holding classes that generate distance fields. | |
Typedefs | |
| typedef std::vector< Eigen::Vector3i, Eigen::aligned_allocator< Eigen::Vector3i > > | EigenSTL::vector_Vector3i |