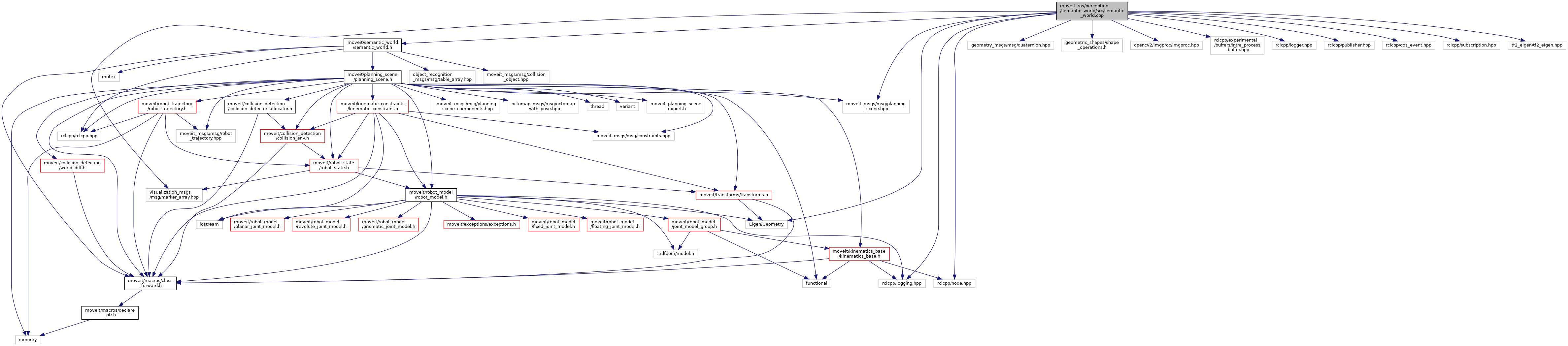
#include <visualization_msgs/msg/marker_array.hpp>#include <geometry_msgs/msg/quaternion.hpp>#include <moveit/semantic_world/semantic_world.h>#include <geometric_shapes/shape_operations.h>#include <moveit_msgs/msg/planning_scene.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <rclcpp/experimental/buffers/intra_process_buffer.hpp>#include <rclcpp/logger.hpp>#include <rclcpp/logging.hpp>#include <rclcpp/node.hpp>#include <rclcpp/publisher.hpp>#include <rclcpp/qos_event.hpp>#include <rclcpp/subscription.hpp>#include <tf2_eigen/tf2_eigen.hpp>#include <Eigen/Geometry>
Include dependency graph for semantic_world.cpp:
Go to the source code of this file.
Namespaces | |
| moveit | |
| Main namespace for MoveIt. | |
| moveit::semantic_world | |