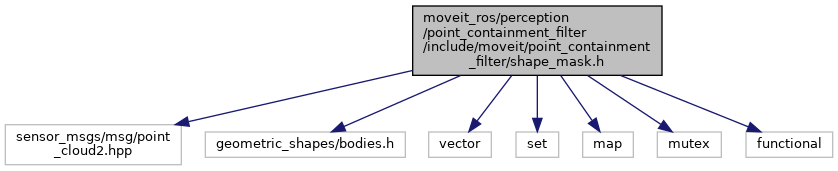
#include <sensor_msgs/msg/point_cloud2.hpp>#include <geometric_shapes/bodies.h>#include <vector>#include <set>#include <map>#include <mutex>#include <functional>
Include dependency graph for shape_mask.h:
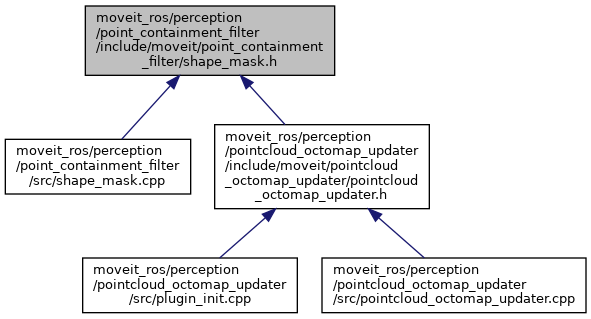
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | point_containment_filter::ShapeMask |
| Computing a mask for a pointcloud that states which points are inside the robot. More... | |
| struct | point_containment_filter::ShapeMask::SeeShape |
| struct | point_containment_filter::ShapeMask::SortBodies |
Namespaces | |
| point_containment_filter | |
Typedefs | |
| typedef unsigned int | point_containment_filter::ShapeHandle |